| Title | Inertial Estimation and Energy-Efficient Control of a Cable-suspended Load with a Team of UAVs |
| Publication Type | Conference Paper |
| Year of Publication | 2020 |
| Authors | Petitti, A, Sanalitro, D, Tognon, M, Milella, A, Cortés, J, Franchi, A |
| Conference Name | 2020 Int. Conf. on Unmanned Aircraft Systems |
| Date Published | 07/2020 |
| Conference Location | Athens, Greece |
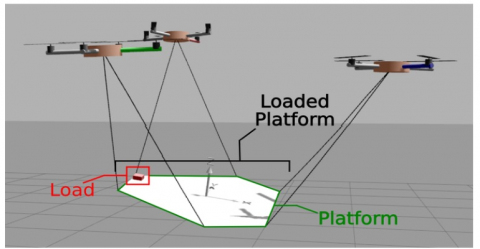
| Abstract | The Fly-Crane is a multi-robot aerial manipulator system composed of three aerial vehicles towed to a platform by means of six cables. This paper presents a method to estimate the mass and the position of the center of mass of a loaded platform (i.e. the Fly-Crane platform including a transported load). The precise knowledge of these parameters allows to sensibly minimize the total effort exerted during a full-pose manipulation task The estimation is based on the measure of the forces applied by the aerial vehicles to the platform in different static configurations. We demonstrate that only two different configurations are sufficient to estimate the inertial parameters. Far-from-ideal numerical simulations show the effectiveness of the estimation method. Once the parameters are estimated, we show the enhancement of the system performances by minimizing the total exerted effort. The validity of the proposed algorithm in non-ideal conditions is presented through simulations based on the Gazebo simulator.
|
| DOI | 10.1109/ICUAS48674.2020.9213842 |
| Citation Key | 2020h-PetSanTogMilCorFra |