Submitted by Antonio Franchi on
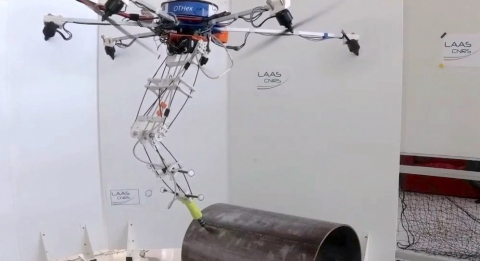
This video shows a summary of the work done in [1]. In this work we studied the problem of designing and controlling an aerial manipulator that is able to push and slide an NDT probe on the curved surface of a pipe.
All the details on the method are given in this paper [1]
References
- , “A Truly Redundant Aerial Manipulator System with Application to Push-And-Slide Inspection in Industrial Plants”, IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1846-1851, 2019.