Submitted by Antonio Franchi on
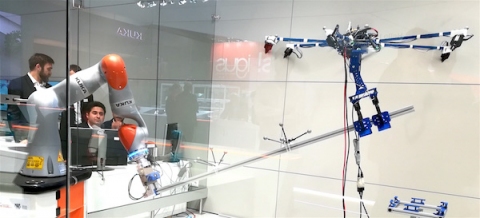
The Tele-MAGMaS team, which I coordinated, has demonstrated the first example of Multiple Aerial-Ground Manipulator System, a heterogeneous multi-robot system composed by a ground manipulator and an aerial robot cooperating together to manipulate a long object.
Tele-MAGMaS team:
LAAS-CNRS: A. Franchi (coordinator), N. Staub, D. Bicego, V. Arellano, Q. Sablé, S. Mishra.
Univ. of Siena: D. Prattichizzo, M Mohammadi.
CNRS and INRIA at IRISA: P Robuffo Giordano, Q. Delamare.
Seoul National University: D-L. Lee, C Ha, H. Yang,
A video of the demonstration explained to the public:
An excerpt of the live-show interview:
The Tele-MAGMaS spotlight:
Attached Pictures :











