| Title | The Flying Hand: a Formation of UAVs for Cooperative Aerial Tele-Manipulation |
| Publication Type | Conference Paper |
| Year of Publication | 2014 |
| Authors | Gioioso, G, Franchi, A, Salvietti, G, Scheggi, S, Prattichizzo, D |
| Conference Name | 2014 IEEE Int. Conf. on Robotics and Automation |
| Pagination | 4335-4341 |
| Date Published | 05/2014 |
| Conference Location | Hong Kong, China |
| Keywords | Aerial Physical Interaction, Aerial Robotics, Bilateral Shared Control of Mobile Robots, Motion control of multiple robots |
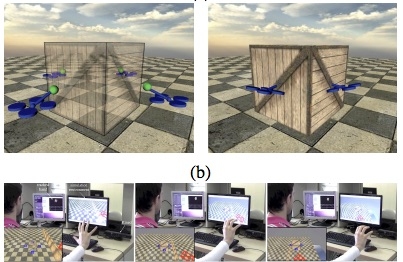
| Abstract | The flying hand is a robotic hand consisting of a swarm of UAVs able to grasp an object where each UAV contributes to the grasping task with a single contact point at the tooltip. The swarm of robots is teleoperated by a human hand whose fingertip motions are tracked, e.g., using an RGB-D camera. We solve the kinematic dissimilarity of this unique master-slave system using a multi-layered approach that includes: a hand interpreter that translates the fingertip motion in a desired motion for the object to be manipulated; a mapping algorithm that transforms the desired object motions into a suitable set of virtual points deviating from the planned contact points; a compliant force control for the case of quadrotor UAVs that allows to use them as indirect 3D force effectors. Visual feedback is also used as sensory substitution technique to provide a hint on the internal forces exerted on the object. We validate the approach with several human-in-the-loop simulations including the full physical model of the object, contact points and UAVs.
|
| Citation Key | 2014a-GioFraSalSchPra |