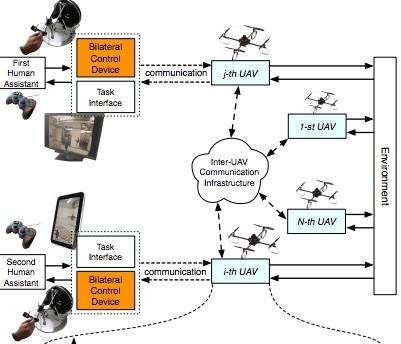
| Abstract | In this paper, we present a complete control framework and associated experimental testbed for the bilateral shared control of a group of quadrotor UAVs. This control architecture is applicable to any task and allows to integrate: i) a decentralized topological motion control (responsible for the mutual interactions in the UAV formation), ii) a human assistance module (allowing human intervention, whenever needed, on some aspects of the UAV group behavior), and iii) a force-feedback possibility (increasing the telepresence of the human assistants by providing suitable haptic cues informative of the UAV behavior).
We will show, as worked-out case studies, how to specialize the topological motion controller to the relevant cases of constant, unconstrained and connected group topologies, and how to let a human operator intervening at the level of single UAVs or of the whole group dynamics.
A detailed description of the experimental testbed is also provided with emphasis on the quadrotor UAV hardware and software architectures. Finally, the versatility of the proposed framework is demonstrated by means of experiments with real UAVs. Although quadrotors are used as actual robotic platforms, the proposed framework can be straightforwardly extended to many different kinds of UAVs with similar motion characteristics.
|