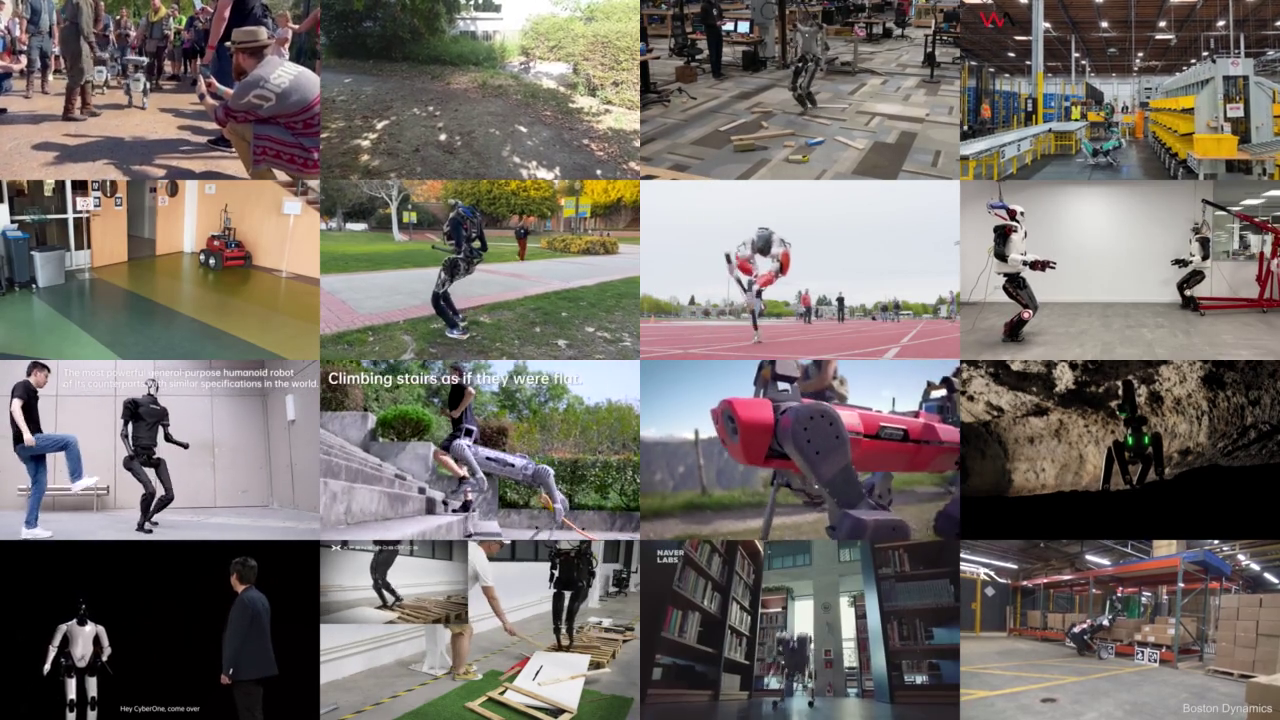
Liste de nouveaux robots humanoïdes
Contexte Les travaux de Pr. Sang Bae Kim sur les moteurs sans broches à plusieurs éléments électromagnétiques, lui a permis de mettre au point le robot quadrupède Cheetah. Ce type de moteur permet d’avoir de très faibles rapport de réduction, typiquement 10, plutôt que 250 ou 150 sur les robots humanoïdes comme ASIMO, HRP-2 ou TALOS.
Lire la suite