View-based localization using panoramic images
Thanks to panoramic images, one can exploit image indexing techniques to
qualitatively localize the rover as it re-traverses an already explored
area. Our approach relies on the possibility to efficiently and robustly
compute the resemblance between panoramic images, indexing them by
histograms of local appearances. A database of image indexes is
dynamically built during rover motions: when the rover re-perceives an
already crossed area, it matches the current image with the stored ones
(place recognition), and thus gets a qualitative estimate of its
position.

The principle of building and use of the histograms is presented in the
figures below [Gonzalez 2002a] [Gonzalez 2002]. The qualitative position is computed
using the distance between the histograms that represents the image. The
robot orientation is then computed by correlating thin rings extracted
from the images.

Learning step: building of the database
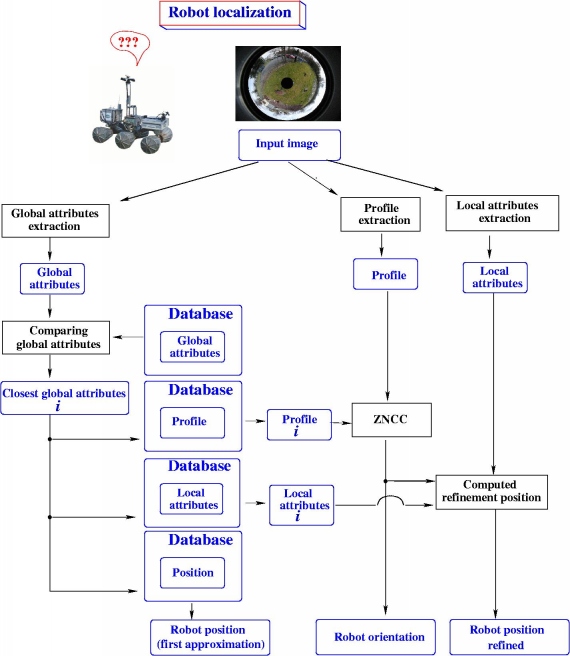
Localization step
Simon Lacroix, José Gonzalez.
| |
General Information
Robots
Rovers Navigation
Autonomous Blimps
Multi-Robot Cooperation
|
