Yet another page under construction...
(This video is in MPEG-4 format. It can be played with
Quicktime 6
or mplayer).
(1 min 13 sec sequence - no sound)
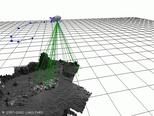
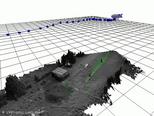
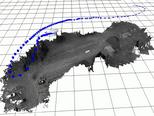
This movie shows the building of a digital elevation map during a
tethered flight over the garden and parking of the lab. The perceived
landmarks are shown as ellipsoids, whose size diminishes when Karma is
flying over an already mapped area.
[Jung 2003] [Lacroix 2001e] [Lacroix 2002a]
Simon Lacroix, Anthony Mallet, Il-Kyun Jung.
| |
General Information
Robots
Rovers Navigation
Autonomous Blimps
Multi-Robot Cooperation
|