A. Zhang,
I. G. Ramirez-Alpizar,
K. Giraud--Esclasse,
O. Stasse,
K. Harada,
Advanced Robotics,
2019,
Vol (33),
pages (454-468),
Publisher
Bib
Abstract:
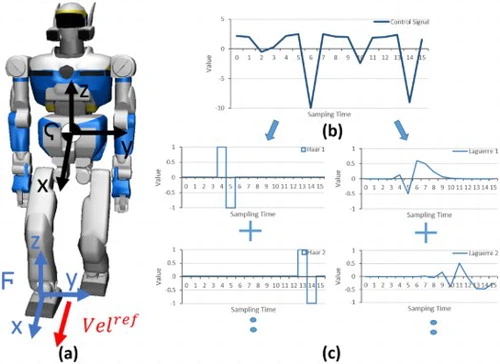
This paper proposes a real-time walking pattern generator (WPG) based on model predictive control (MPC). Since reducing the calculation time is a crucial problem in real-time WPG, we consider introducing basis functions to reduce the number of control input. The control inputs in the MPC are described by a series of basis functions. Compared with the standard discrete-time MPC formulation, the approach with basis functions requires fewer optimization variables at the cost of decreasing precision. In order to find an appropriate trade-off, two basis functions named Laguerre functions and Haar functions, are tested in this paper. MPC with Laguerre functions decreases more computational load while MPC with Haar functions offers a more accurate solution. The approach is not restricted to Laguerre functions or Haar functions, users can select their own basis functions for different applications and preferences.