O . Stasse,
B. Verrelst,
B. Vanderborght,
K. Yokoi,
IEEE Transactions on Robotics,
2009,
Vol (25),
Issue (4),
pages (960-967),
HAL
Publisher
Bib
PDF
Abstract:
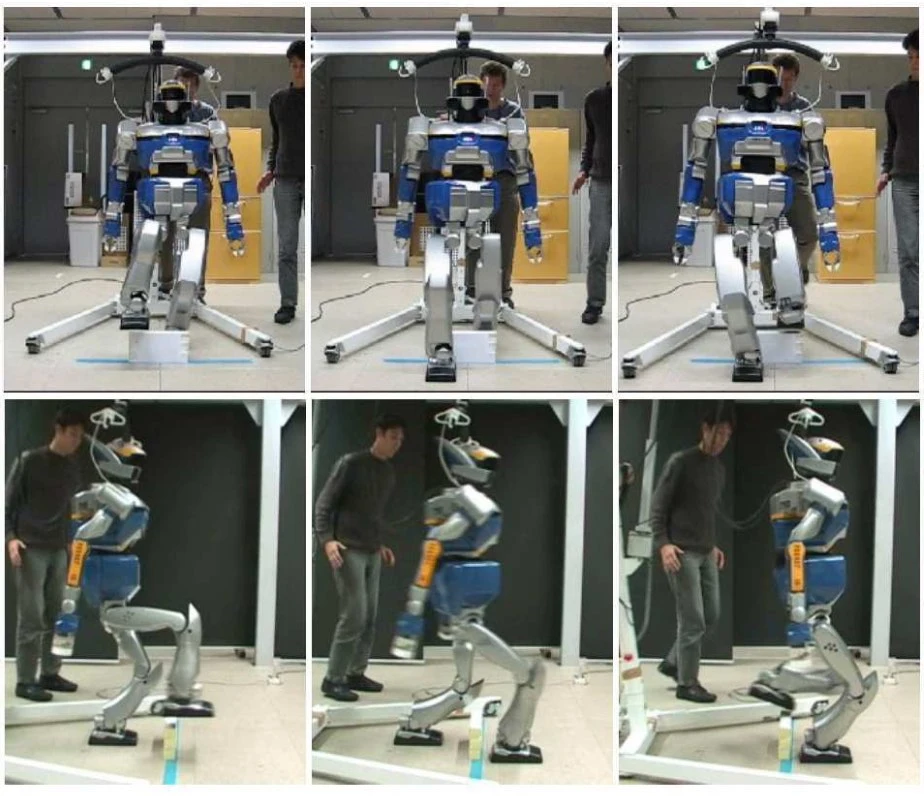
This study proposes a complete solution to make the humanoid robot HRP-2 dynamically step over large obstacles. As compared to previous results using quasi-static stability [1] where the robot crosses over a 15 cm obstacle in 40 s, our solution allows HRP-2 to step over the same obstacle in 4 s. This approach allows the robot to clear obstacles as high as 21% of the robot's leg length (15 cm) while walking. Simulations show the possibility to step over an obstacle that is 35% of the length(25 cm) with a margin of 3 cm.