O. Stasse,
K. Giraud--Esclasse,
E. Brousse,
M. Naveau,
R. Régnier,
G. Avrin,
P. Souères,
Frontiers in Robotics and AI,
2018,
Vol (5),
pages (122),
Publisher
Bib
PDF
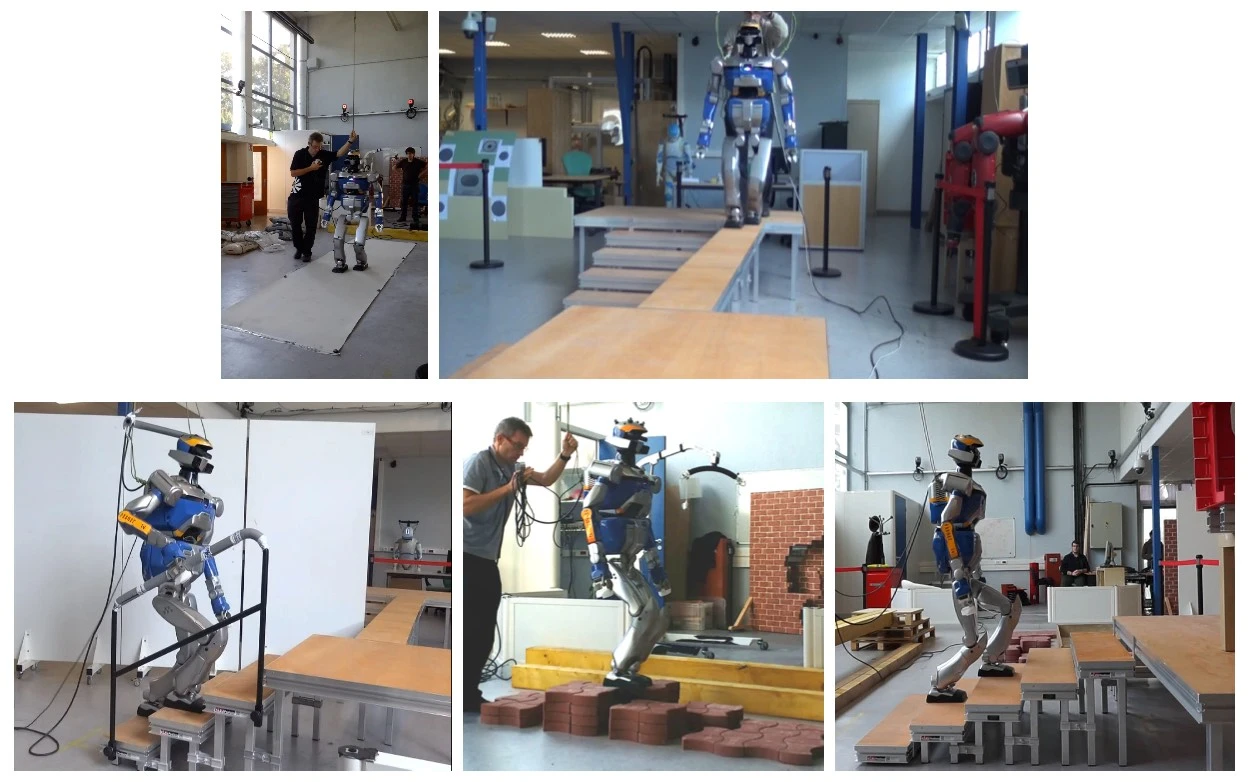
Abstract:
In this paper we report results from a campaign of measurement in a laboratory allowing to put a humanoid robot HRP-2 in a controlled environment. We have investigated the effect of temperature variations on the robot capabilities to walk. In order to benchmark various motions modalities and algorithms we computed a set of performance indicators for bipedal locomotion. The scope of the algorithms for motion generation evaluated here is rather large as it spans analytical solutions to numerical optimization approaches able to realize real-time walking or multi-contacts.