O. Stasse,
B. Verrelst,
P. -B. Wieber,
B. Vanderborght,
P. Evrard,
A. Kheddar,
K. Yokoi,
Advanced Robotics, Special Issue on Middleware for Robotics --Software and Hardware Module in Robotics System,
2008,
Vol (22),
pages (589-611),
HAL
Publisher
Bib
PDF
Abstract:
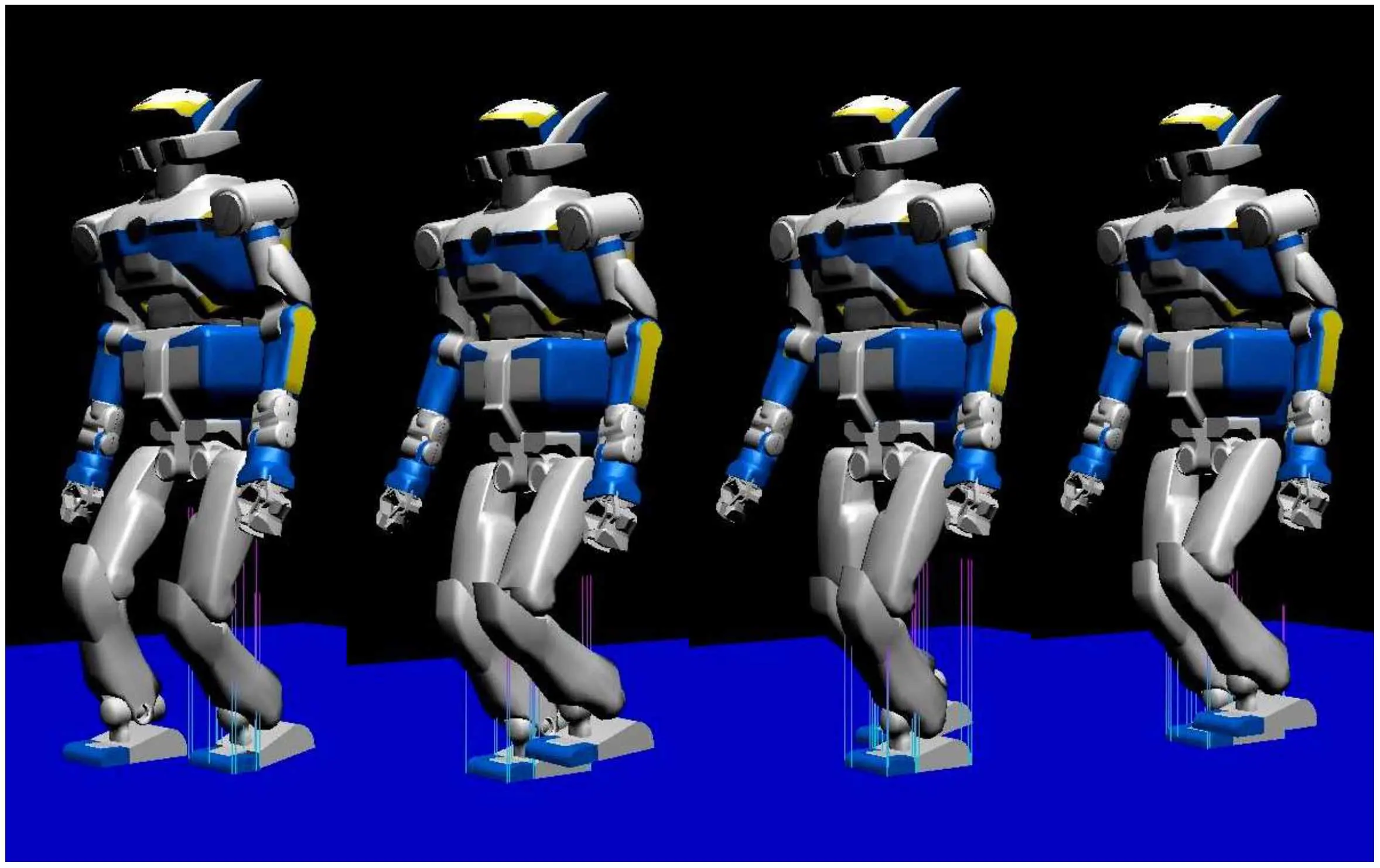
In this paper we describe the use of design patterns as a basis for creating a Humanoid Walking Pattern Generator Software having a modular architecture. This architecture made possible the rapid porting of several novel walking algorithms on a full size humanoidrobot HRP-2. The body of work currently available allows extracting a general software architecture usable with inter-exchange between simulations and real experiments. The proposed architecture with the associated design patterns are described together with several applications: a pattern generator for a HRP-2 withpassive toe-joints, a pattern for dynamically stepping over large obstacles, and a new quadratic problem (QP) formulation for the generation of the reference ZMP. Thanks to the versatility and the modularity of the proposed framework, the QP method has been implemented and experienced within four days only.