Journals
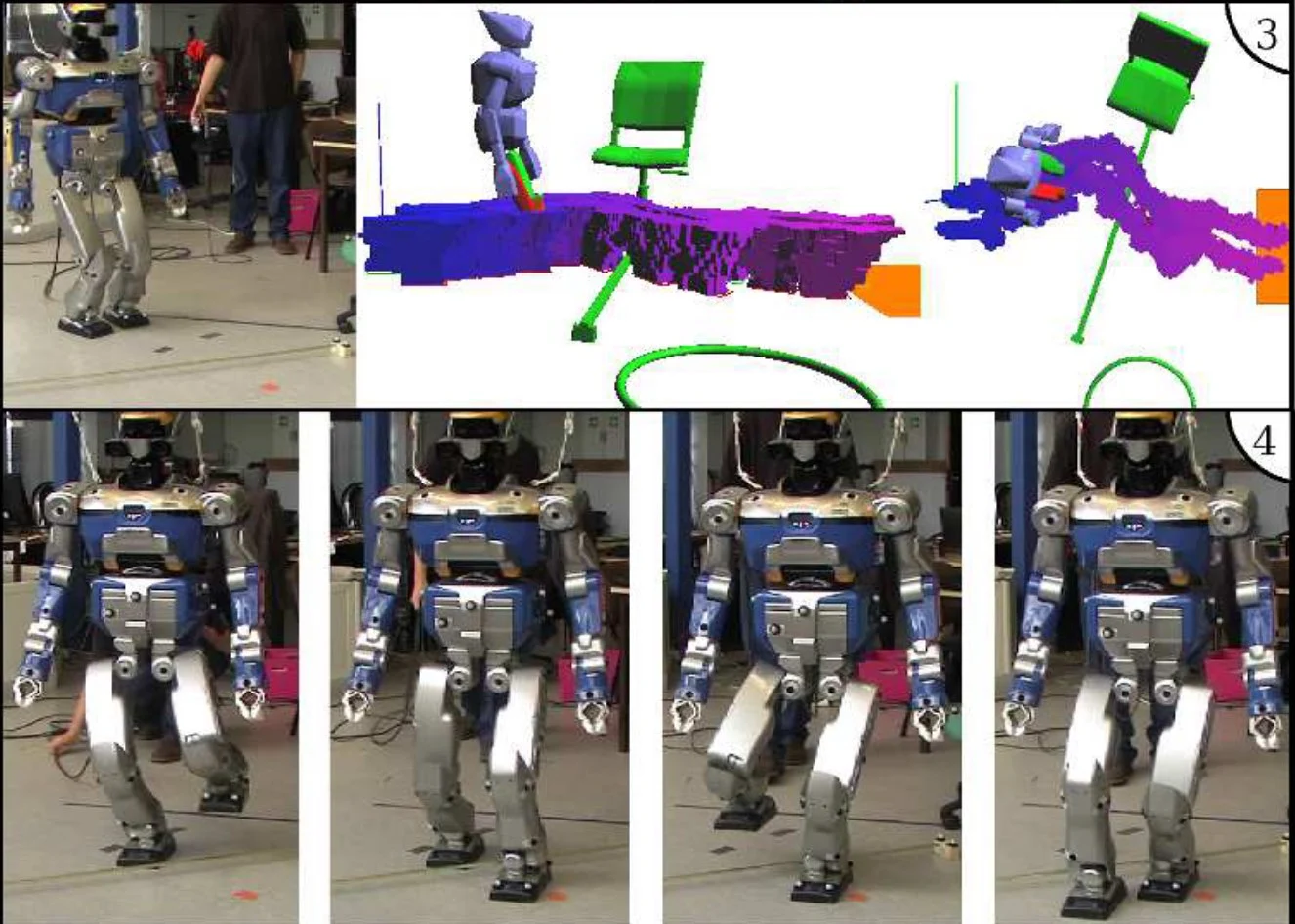
Towards Reactive Vision-Guided walking on rough terrain: An Inverse-Dynamics Based Approach
O. E. Ramos,
G. Mauricio,
N. Mansard,
O. Stasse,
J. -B. Hayet,
P. Soueres,
Int. Journal of Humanoid Robotics, 2014
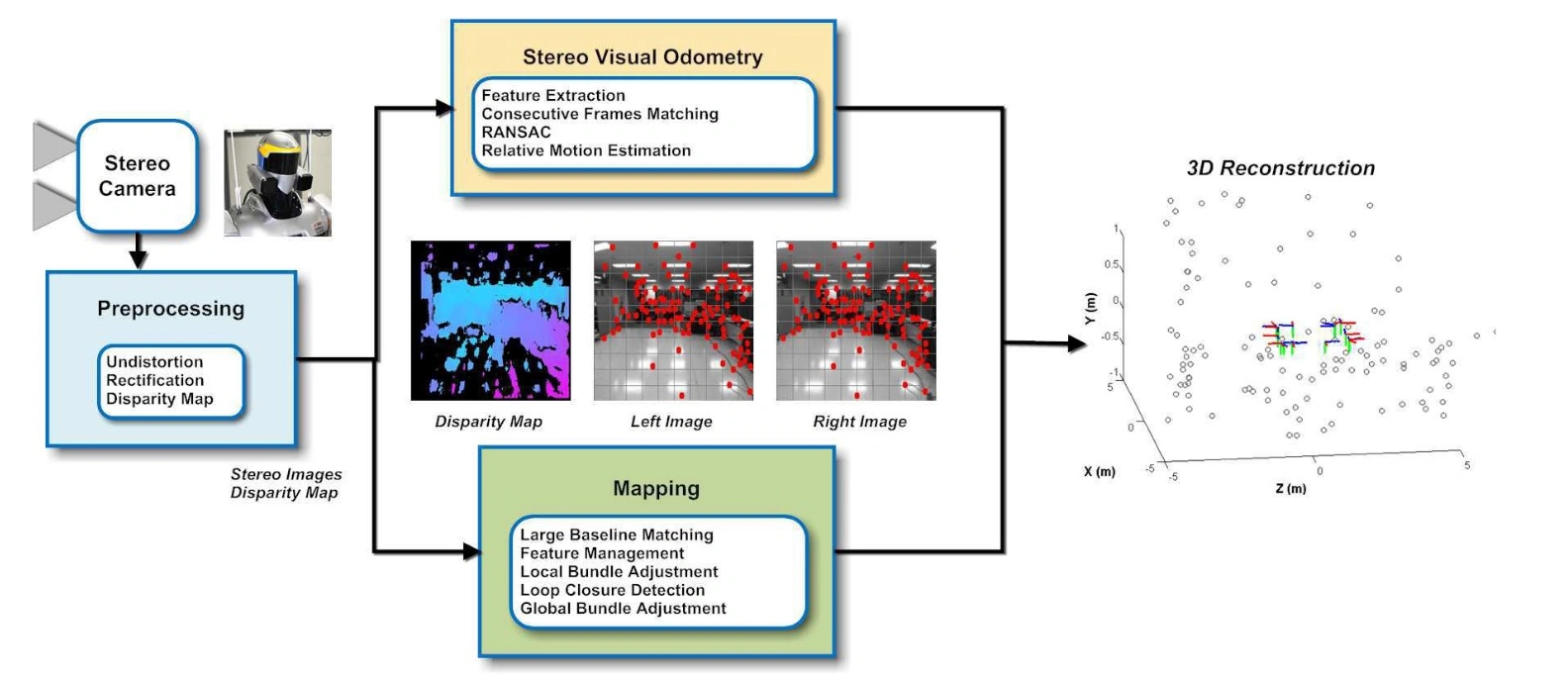
How to Localize Humanoids with a Single Camera ?
P. F. Alcantarilla,
O. Stasse,
S. Druon,
L. M. Bergasa,
F. Dellaert,
Autonomous Robots, 2013
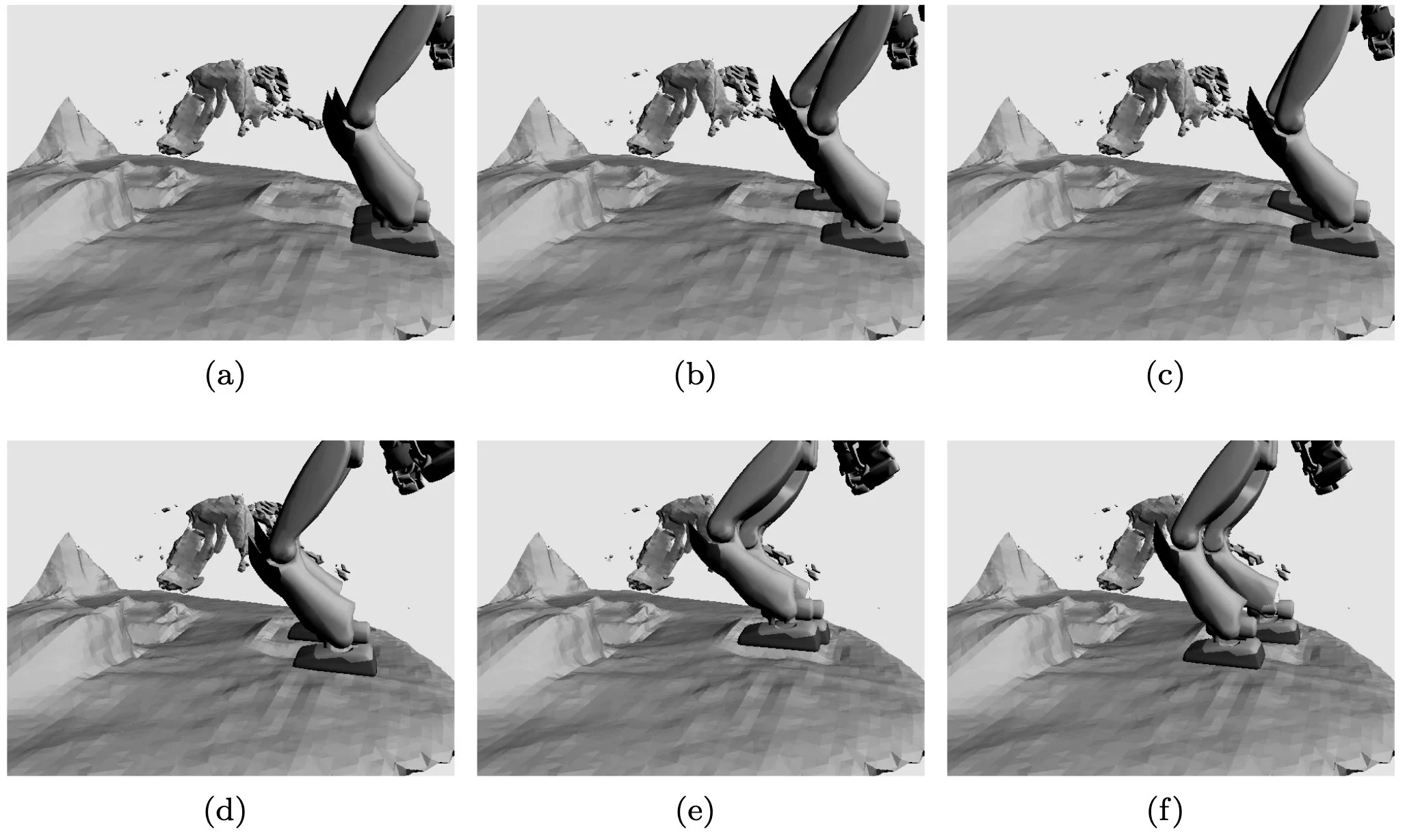
Humanoid motion generation and swept volumes: theoretical bounds for safe steps
N. Perrin,
O. Stasse,
F. Lamiraux,
E. Yoshida,
Advanced Robotics, 2013
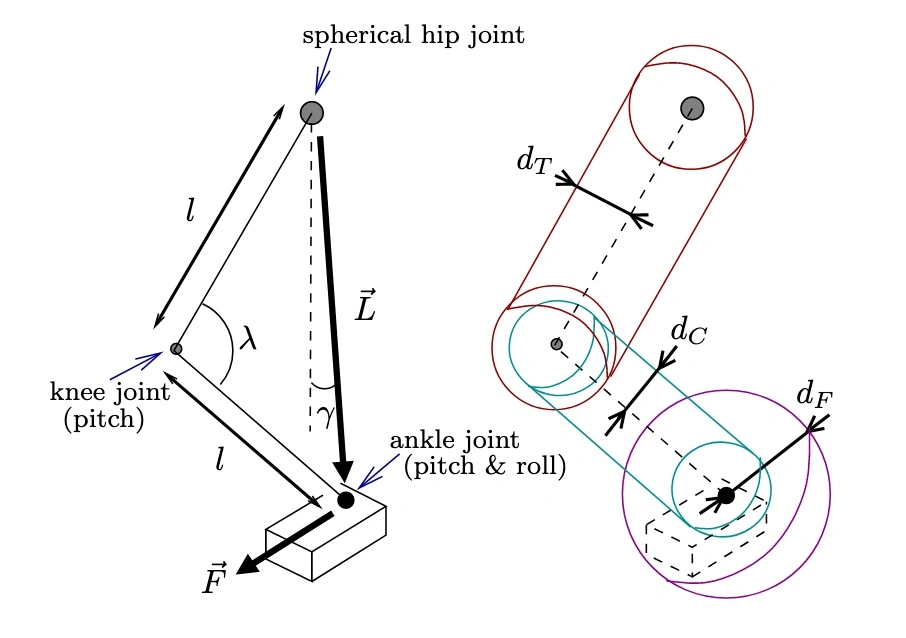
Fast humanoid robot collision-free footstep planning using swept volume approximations
N. Perrin,
O. Stasse,
L. Baudouin,
F. Lamiraux,
E. Yoshida,
IEEE Transactions on Robotics, 2012