Journals
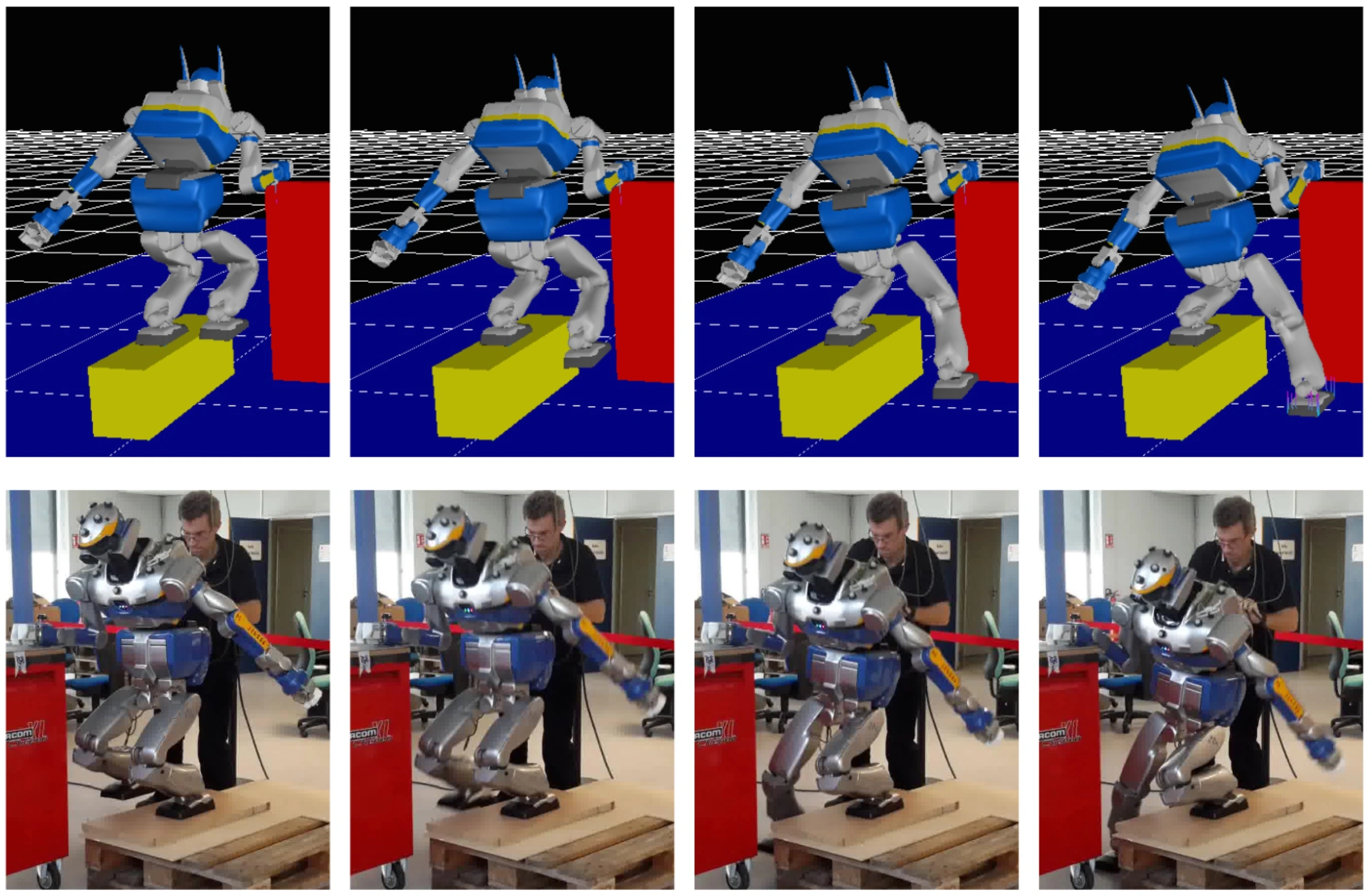
Dancing Humanoid Robots: Systematic use of OSID to Compute Dynamically Consistent Movements Following a Motion Capture Pattern
O. E. Ramos,
N. Mansard,
O. Stasse,
S. Hak,
L. Saab,
IEEE Robotics and Automation Magazine, 2015

Time-Optimal Path Parameterization for Redundantly-Actuated Robots (Numerical Integration Approach)
Q. -C. Pham,
O. Stasse,
IEEE Trans. on Mechatronics, 2015
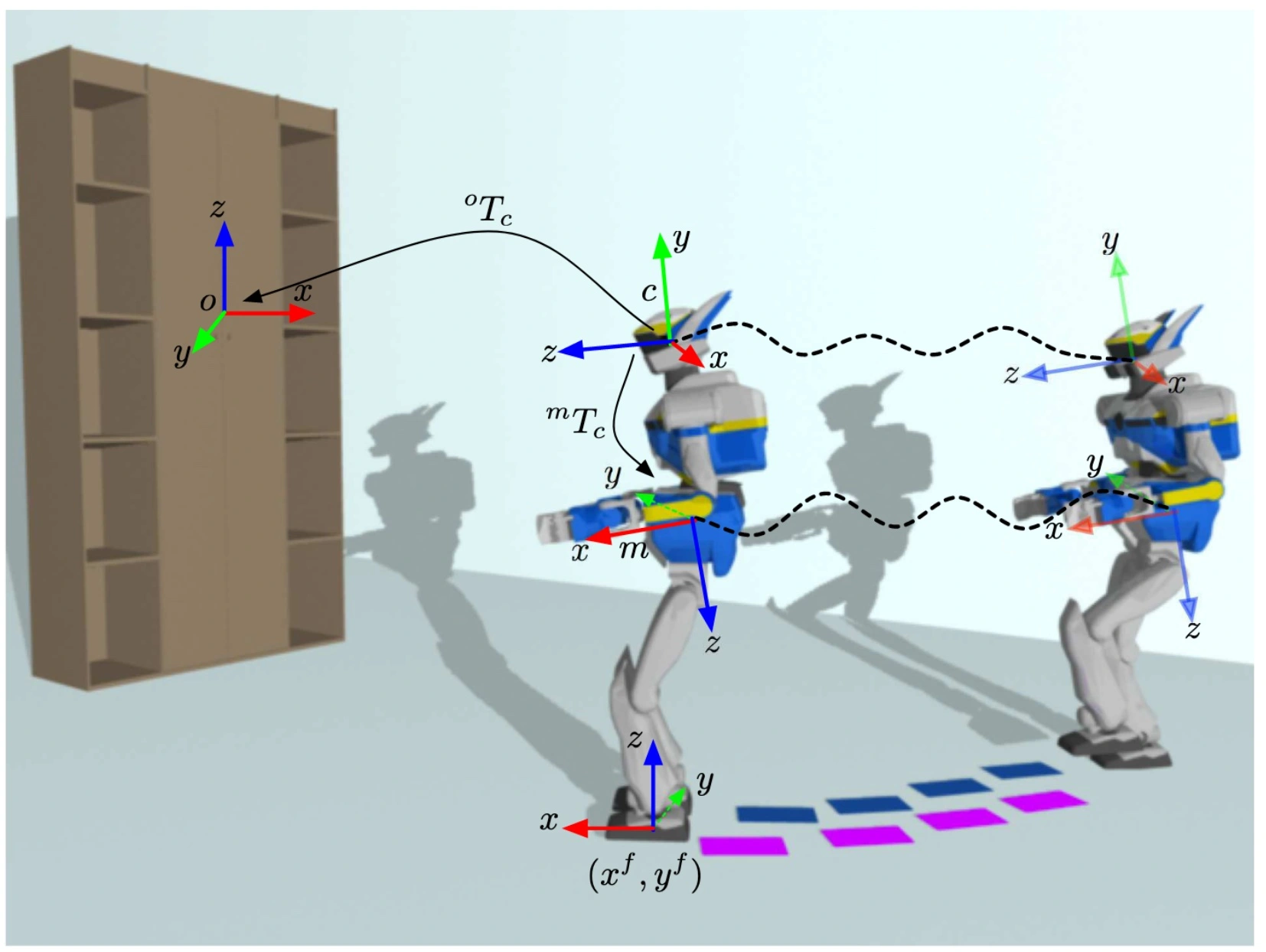
Vision-guided motion primitives for humanoid reactive walking: decoupled vs. coupled approaches
M. Garcia,
O. Stasse,
J. -B. Hayet,
C. Dune,
C. Esteves,
J. -P. Laumond,
Int. Journal of Robotics Research, 2015
Guest Editorial
O. Stasse,
M. Bennewitz,
Int. Journal of Humanoid Robotics,