Journals
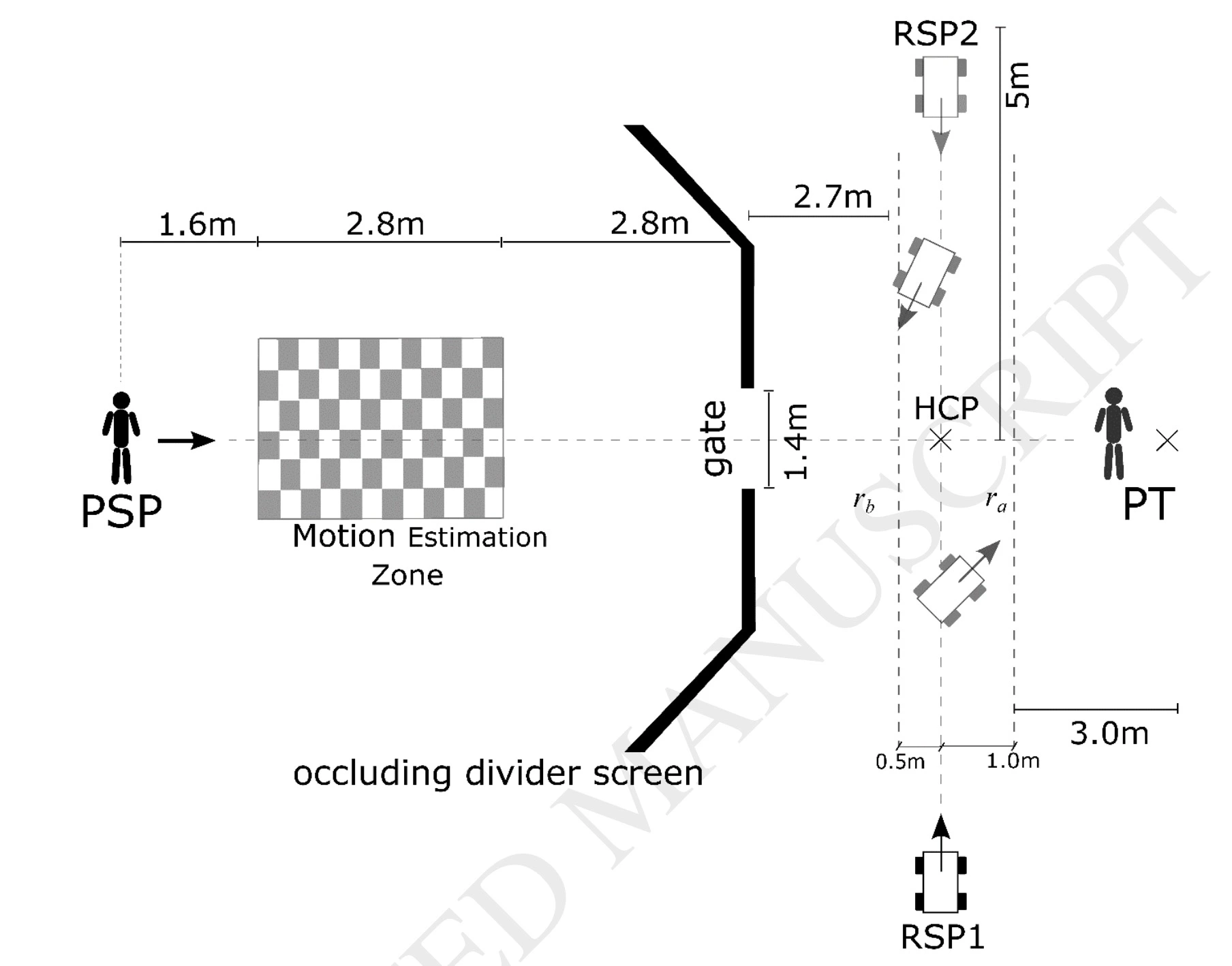
How do walkers behave when crossing the way of a mobile robot that replicates human interaction rules ?
C. Vassallo,
A. H. Olivier,
P. Souères,
A. Crétual,
O. Stasse,
J. Pettré,
Gait and posture, 2018
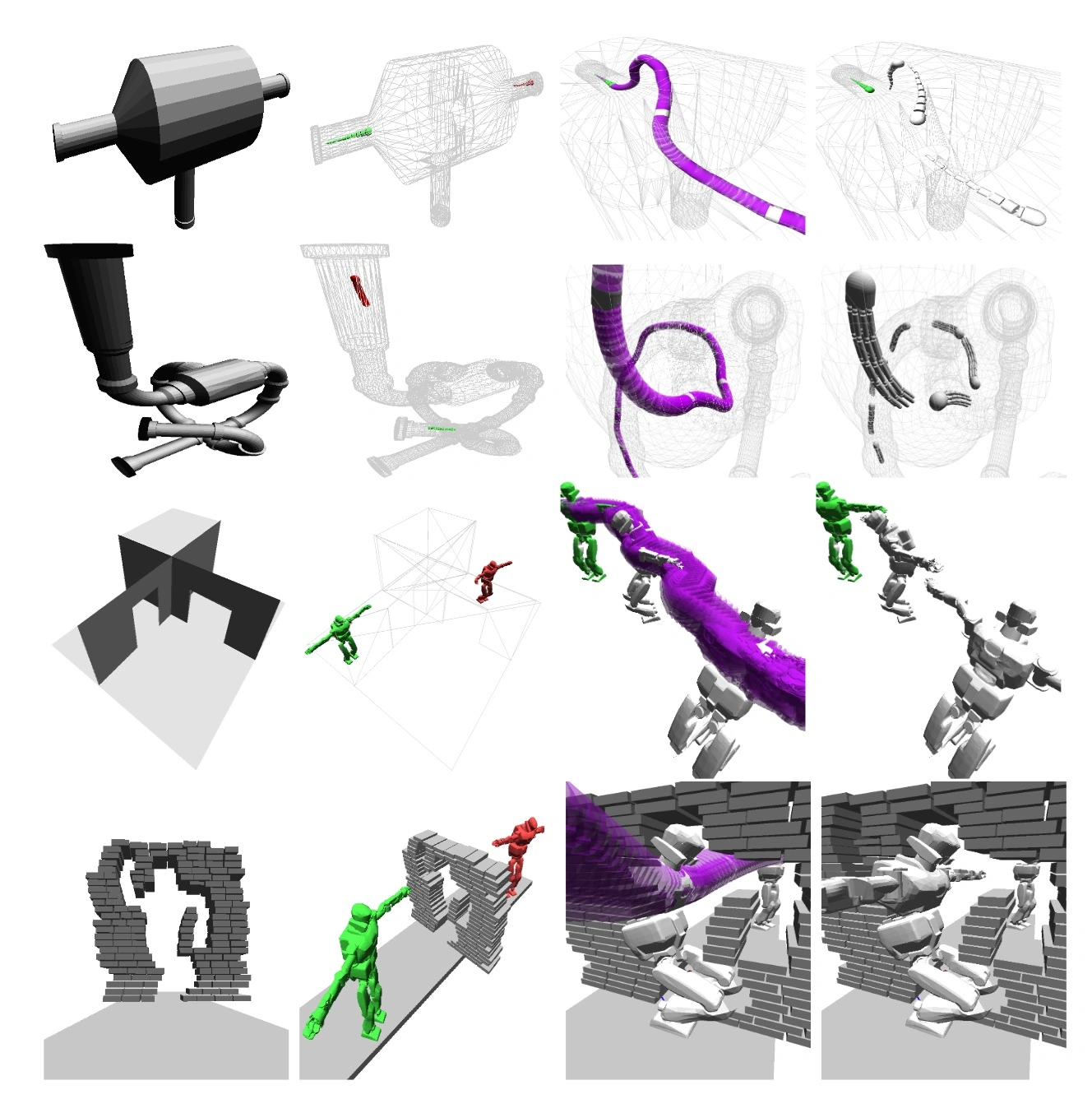
Motion planning in irreducible path spaces
A. Orthey,
O. Roussel,
O. Stasse,
M. Taïx,
Robotics and Autonomous Systems, 2018
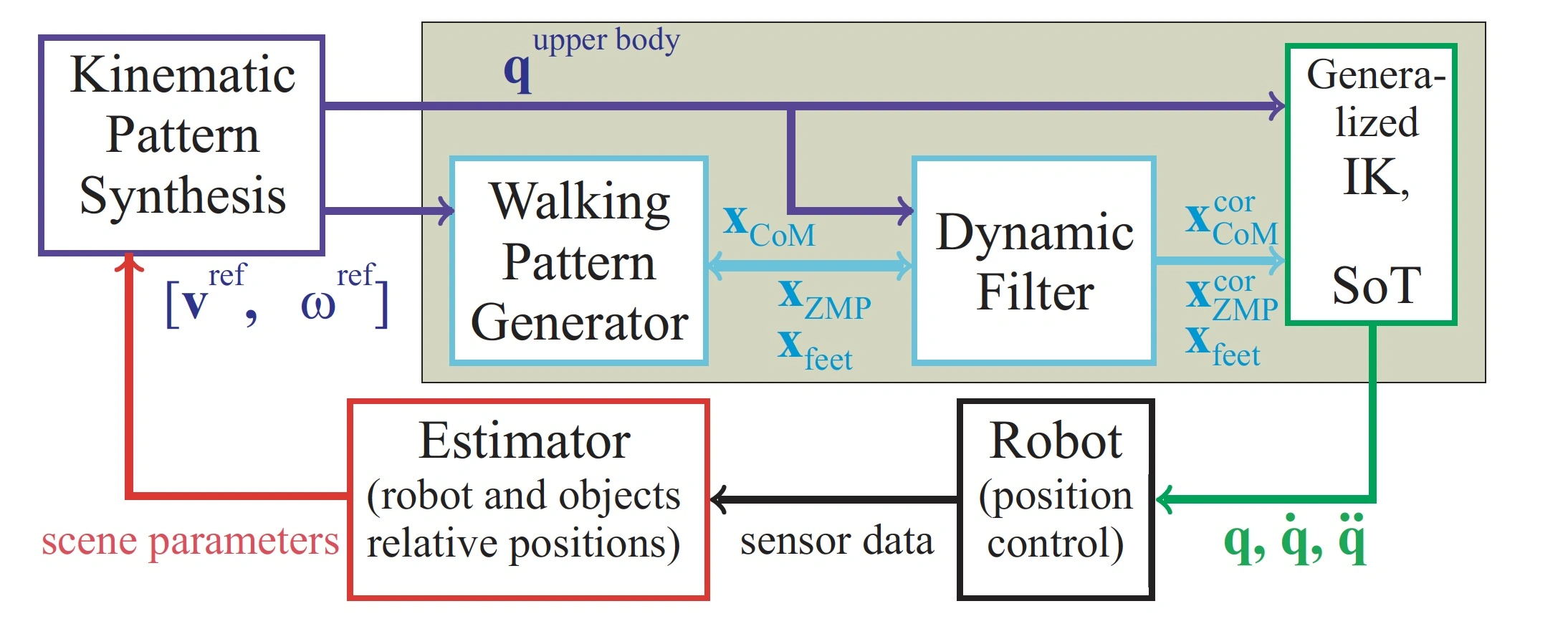
A Reactive Walking Pattern Generator Based on Nonlinear Model Predictive Control
M. Naveau,
M. Kudruss,
O. Stasse,
C. Kirches,
K. Mombaur,
P. Soueres,
IEEE/RAS Robotics and Automation Letters,
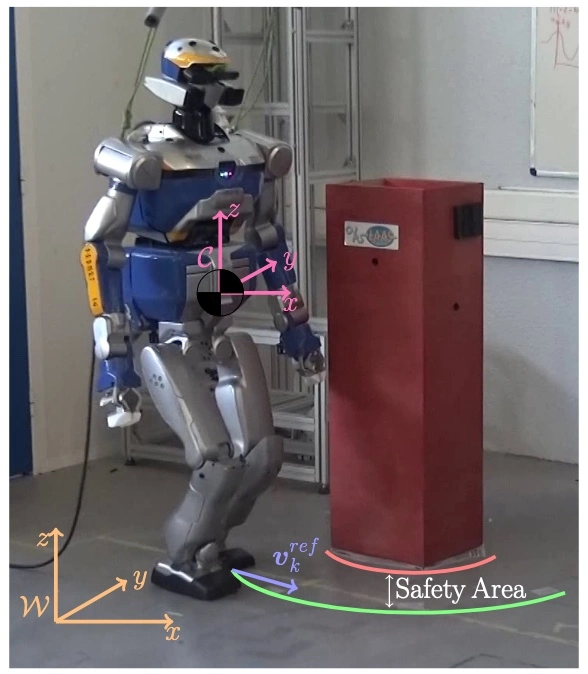
Adaptive synthesis of dynamically feasible full-body movements for the humanoid robot HRP-2 by flexible combination of learned dynamic movement primitives
A. Mukovskiy,
C. Vassallo,
M. Naveau,
O. Stasse,
P. Soueres,
M.-A. Giese,
Robotics and Autonomous Systems, 2017