Journals
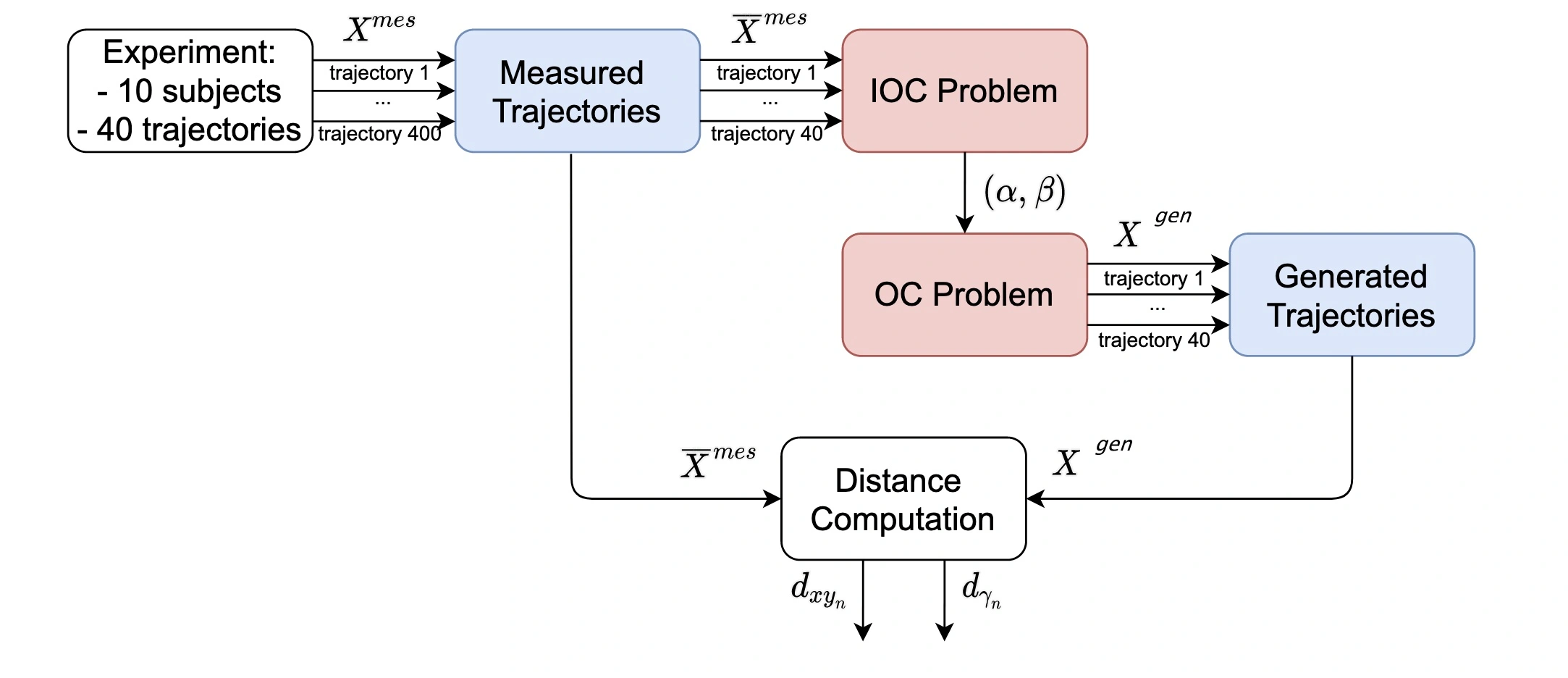
Inverse optimal control to model human trajectories during locomotion
I. Maroger,
O. Stasse,
B. Watier,
Computer Methods in Biomechanics and Biomedical Engineering, 2021
C-CROC: Continuous and Convex Resolution of Centroidal dynamic trajectories for legged robots in multi-contact scenarios
P. Fernbach,
S. Tonneau,
O. Stasse,
J. Carpentier,
M. Taïx,
IEEE Transactions on Robotics, 2020

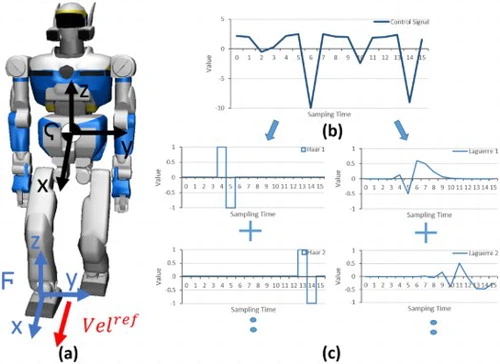
Humanoid walking pattern generation based on model predictive control approximated with basis functions
A. Zhang,
I. G. Ramirez-Alpizar,
K. Giraud--Esclasse,
O. Stasse,
K. Harada,
Advanced Robotics, 2019
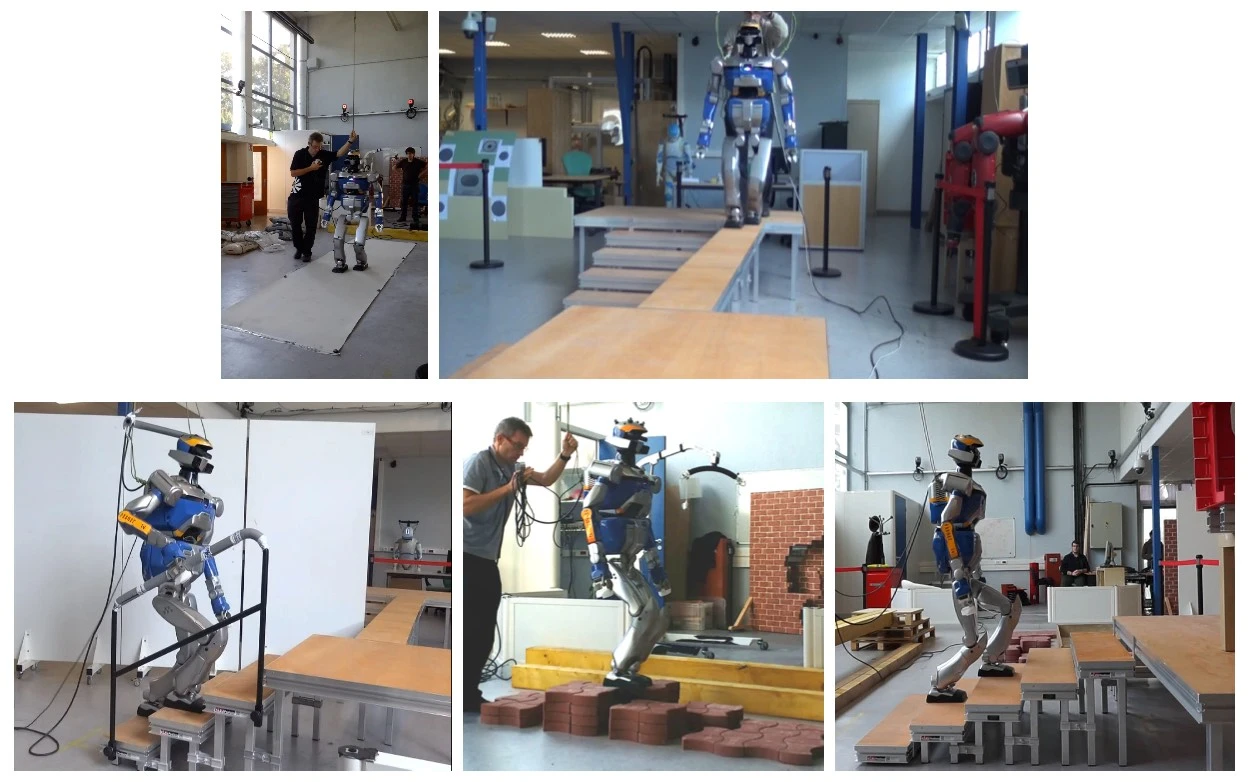
Benchmarking the HRP-2 humanoid robot during locomotion
O. Stasse,
K. Giraud--Esclasse,
E. Brousse,
M. Naveau,
R. Régnier,
G. Avrin,
P. Souères,
Frontiers in Robotics and AI, 2018