M. Naveau,
M. Kudruss,
O. Stasse,
C. Kirches,
K. Mombaur,
P. Soueres,
IEEE/RAS Robotics and Automation Letters,
Vol (2),
Issue (1),
pages (10-17),
HAL
Publisher
Bib
PDF
Abstract:
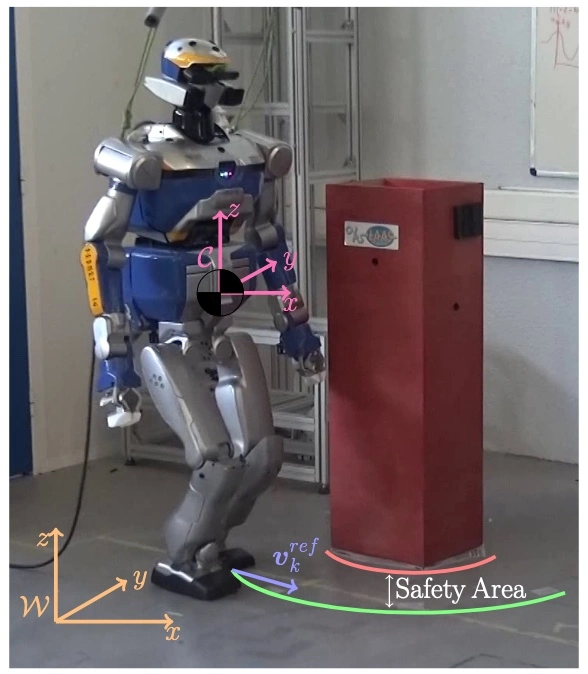
The contribution of this work is to show thatreal-time nonlinear model predictive control (NMPC) can be implemented on position controlled humanoid robots. Following the idea of “walking without thinking”, we propose a walking pattern generator that takes into account simultaneously the position and orientation of the feet. A requirement for an application in real-world scenarios is the avoidance of obstacles. Therefore the paper shows an extension of the pattern generator that directly considers the avoidance of convex obstacles. The algorithm uses the whole-body dynamics to correct the center of mass trajectory of the underlying simplified model. The pattern generator runs in real-time on the embedded hardware of the humanoid robot HRP-2 and experiments demonstrate the increase in performance with the correction.
Software
An initial implementation of this algorithm exists in python here: https://github.com/laas/nmpc_walkgen
It was successfully used to pull a fire hoze. See the work of Ixchel Ramirez in ICHR-2016.
A recent extension is including a model of human motion (see the scientific work in RAL-2021 ) can be found here: https://github.com/imaroger/nmpc_walkgen/tree/devel