Q. -C. Pham,
O. Stasse,
IEEE Trans. on Mechatronics,
2015,
Vol (20),
Issue (6),
HAL
Publisher
Bib
PDF
Abstract:
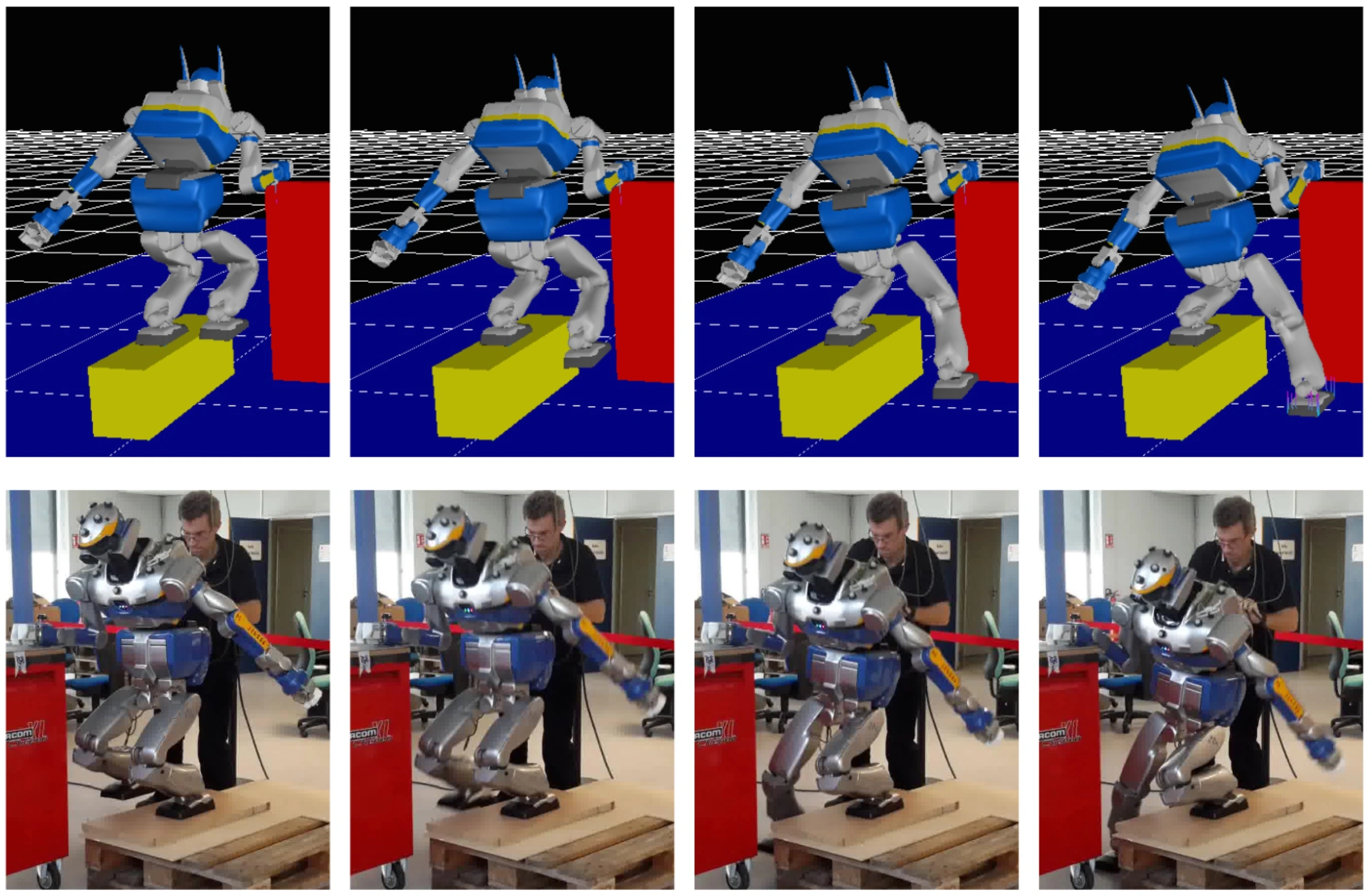
Time-Optimal Path Parameterization (TOPP) under actuation bounds plays a fundamental role in many robotic theories and applications. This algorithm was first developed and perfected for classical serial robotic manipulators whose actuation is non-redundant. Yet, redundantly-actuated systems, such as parallel manipulators or humanoid robots in multi-contact tasks, are increasingly common in all fields of robotics. Here we extend the classical algorithm of TOPP (a.k.a. numerical integration approach) to the case of redundantlyactuated systems. As illustration, we present an application to multicontact trajectory planning for a humanoid robot.