Journals
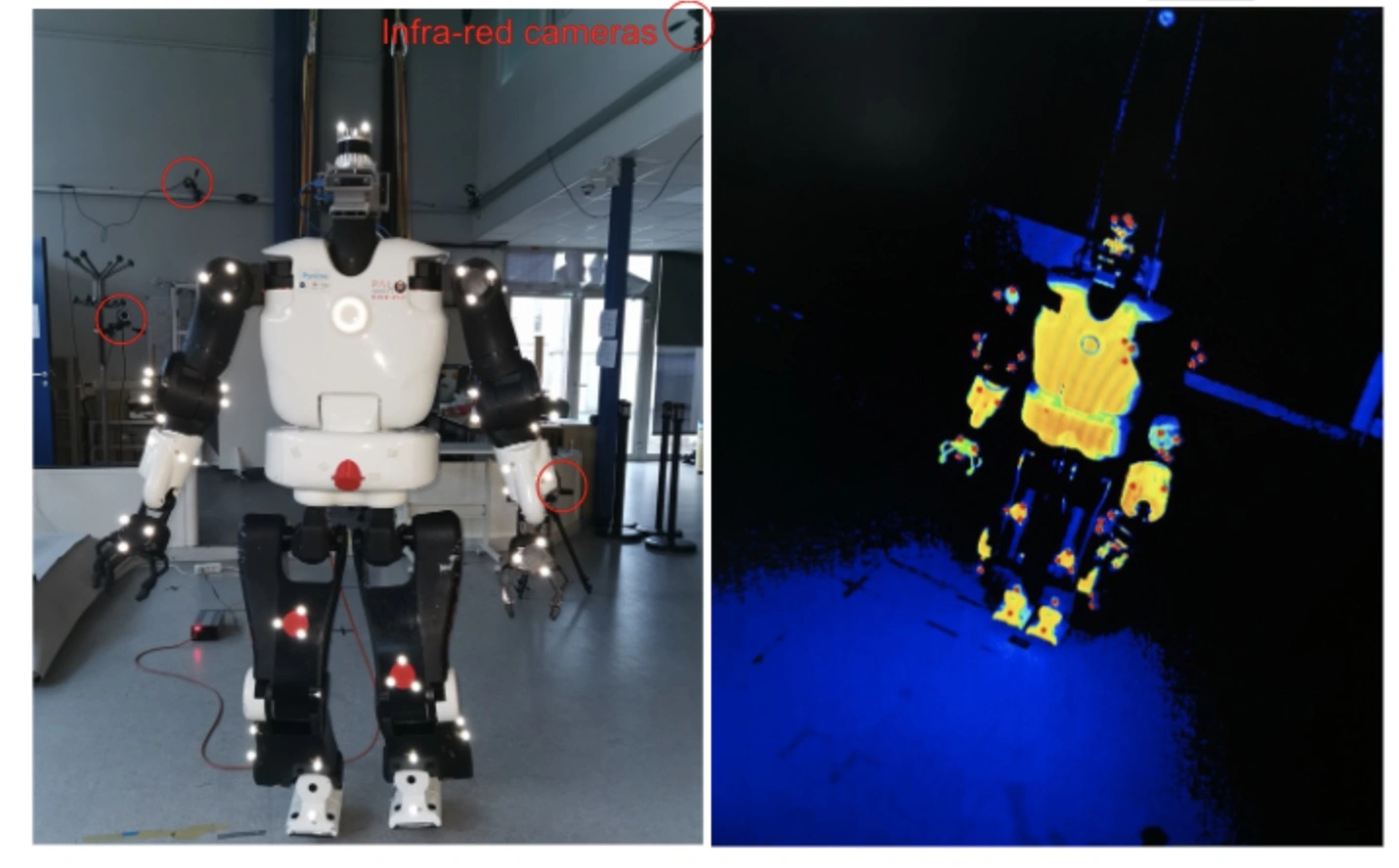
Practical whole-body elasto-geometric calibration of a humanoid robot: Application to the TALOS robot
V. Bonnet,
J. Mirabel,
D. Daney,
F. Lamiraux,
M. Gautier,
O. Stasse,
Robotics and Autonomous Systems, 2023
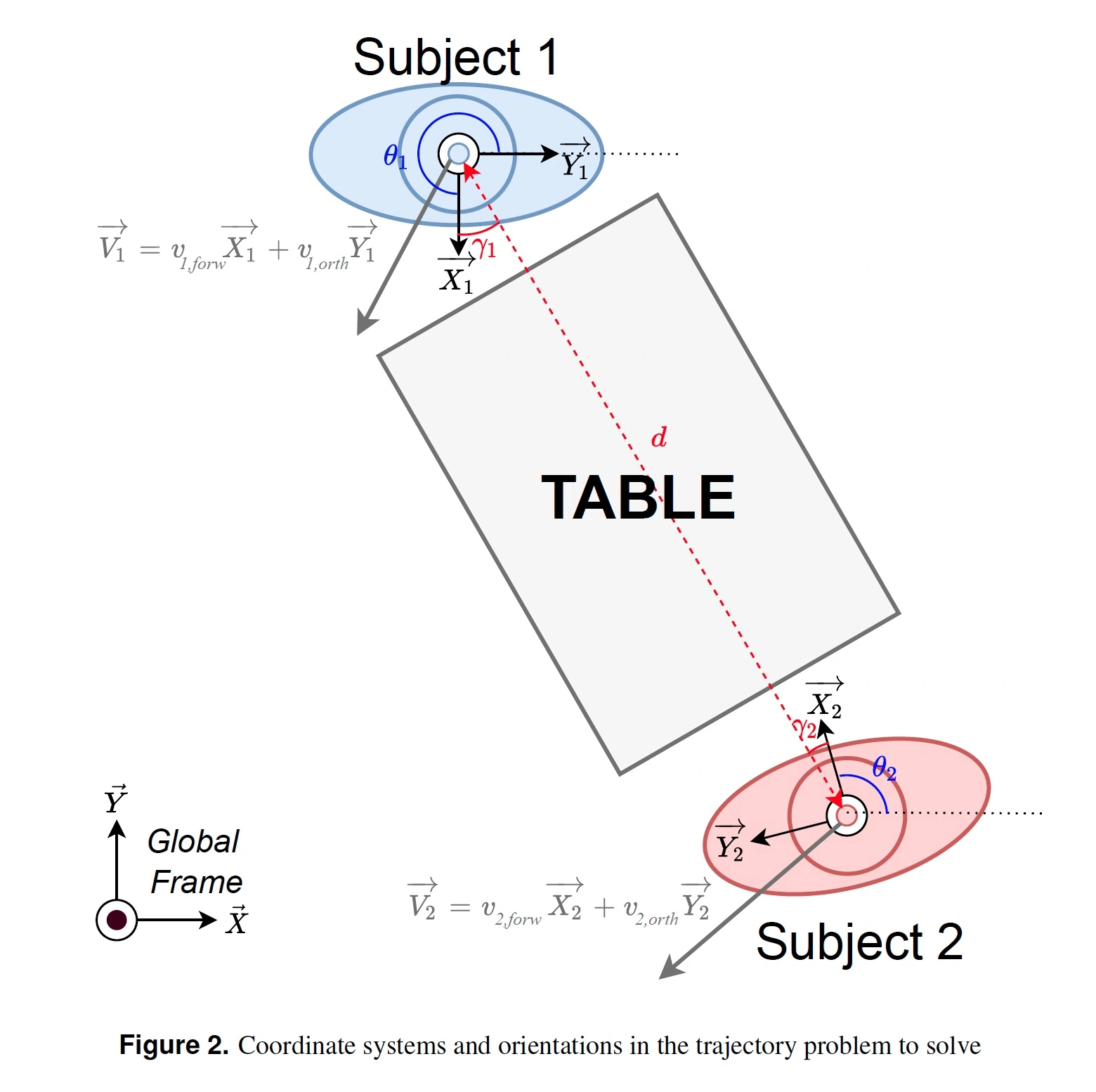
Does a Shared Strategy Emerge from the Study of Walking Paths during Collaborative Carriages?
I. Maroger,
M. Silva,
H. Pillet,
N. Turpin,
O. Stasse,
B. Watier,
Scientific Reports, 2022
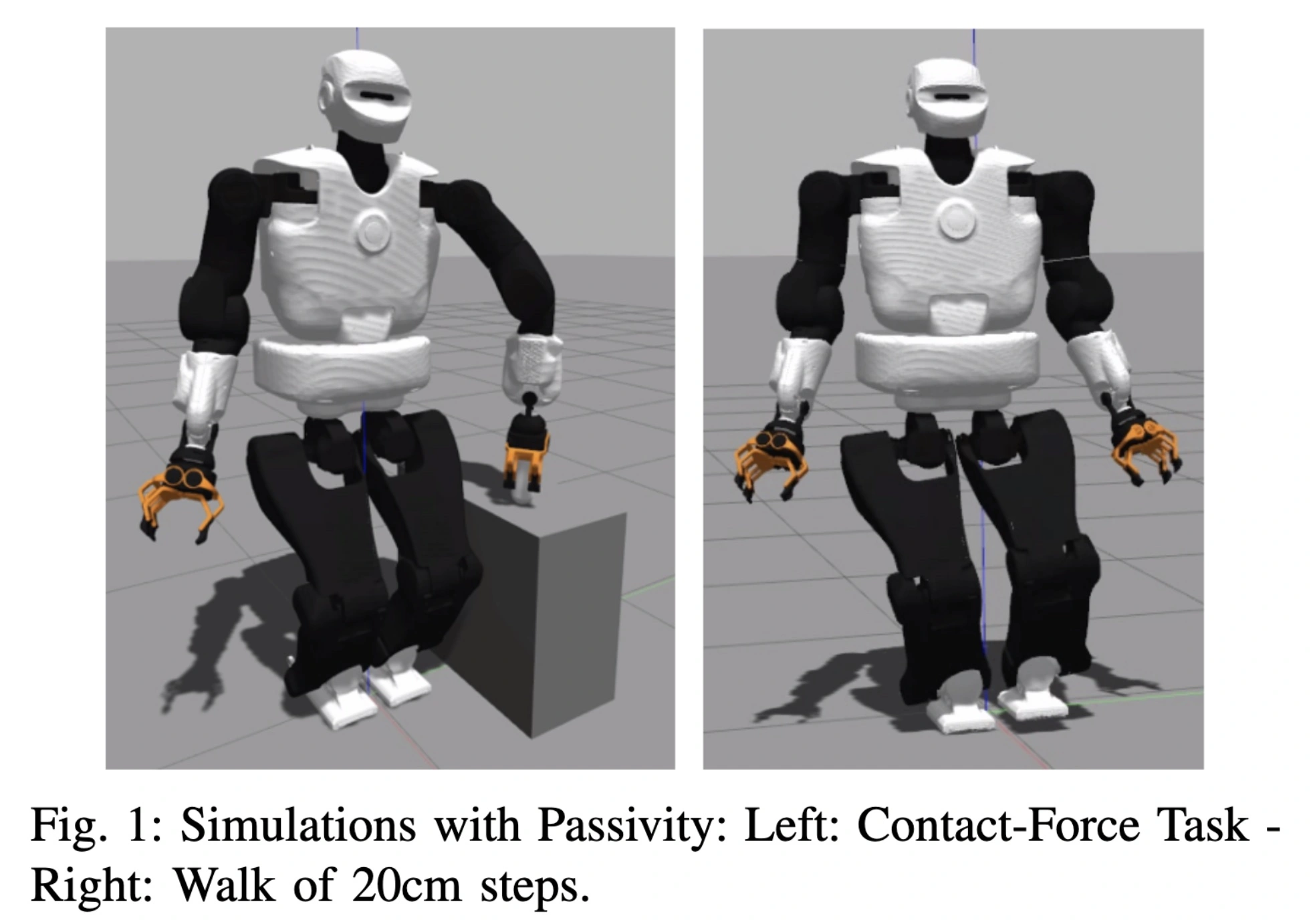
Passive Inverse Dynamics Control Using a Global Energy Tank for Torque-Controlled Humanoid Robots in Multi-Contact.
N. Ramuzat,
O. Stasse,
S. Boria,
IEEE Robotics and Automation Letters, 2022
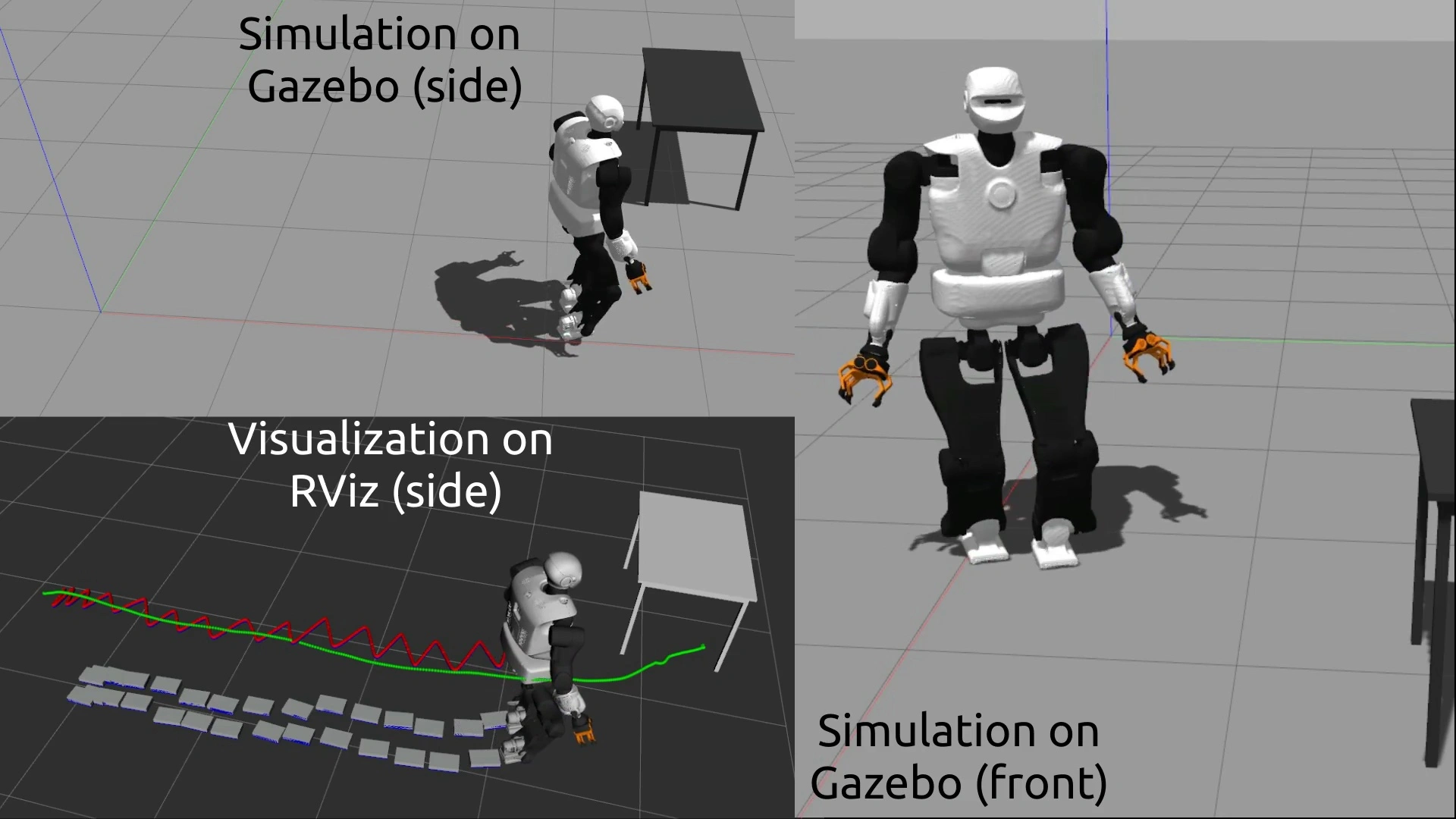
Human Trajectory Prediction Model and its Coupling with a Walking Pattern Generator of a Humanoid Robot
I. Maroger,
N. Ramuzat,
O. Stasse,
B. Watier,
IEEE Robotics and Automation Letters, 2021