R(obotic)-Blink:
Rendre les robots humanoïdes capables de réagir en un clin d'oeil
Project Details
- Type : Projet ANR
- Travail effectué : Whole body control/Walking
- Outils utilisés : Stack-of-Tasks, jrl-walkgen
- Fini en : 2011
- Concepts : Model Predictive Control / Walking / Whole body control
- Partenaires : Florent Lamiraux, Pierre-Brice Wieber, Florent Lamiraux
R-Blink
Le but de ce projet est d’équiper les robots humanoïdes avec des mécanismes de prises de décision rapide pour la génération de mouvements.
Planification de mouvements
Avec Nicolas Perrin nous avons developpé des techniques de planification de mouvementss basé sur une idée simple: est-il possible de créer un oracle pour la validation de transition d’états durant la planification de mouvements ? Cette partie habituellement résolue par une simulation du contrôle, pourrait être connectée très rapidement et trouver un chemin pourraît être effectué très efficacement. De façon à construire cet oracle nous avons utilisé des techniques d’approximation pour apprendre si une transition entre deux états dans l’espace d’état est faisable.
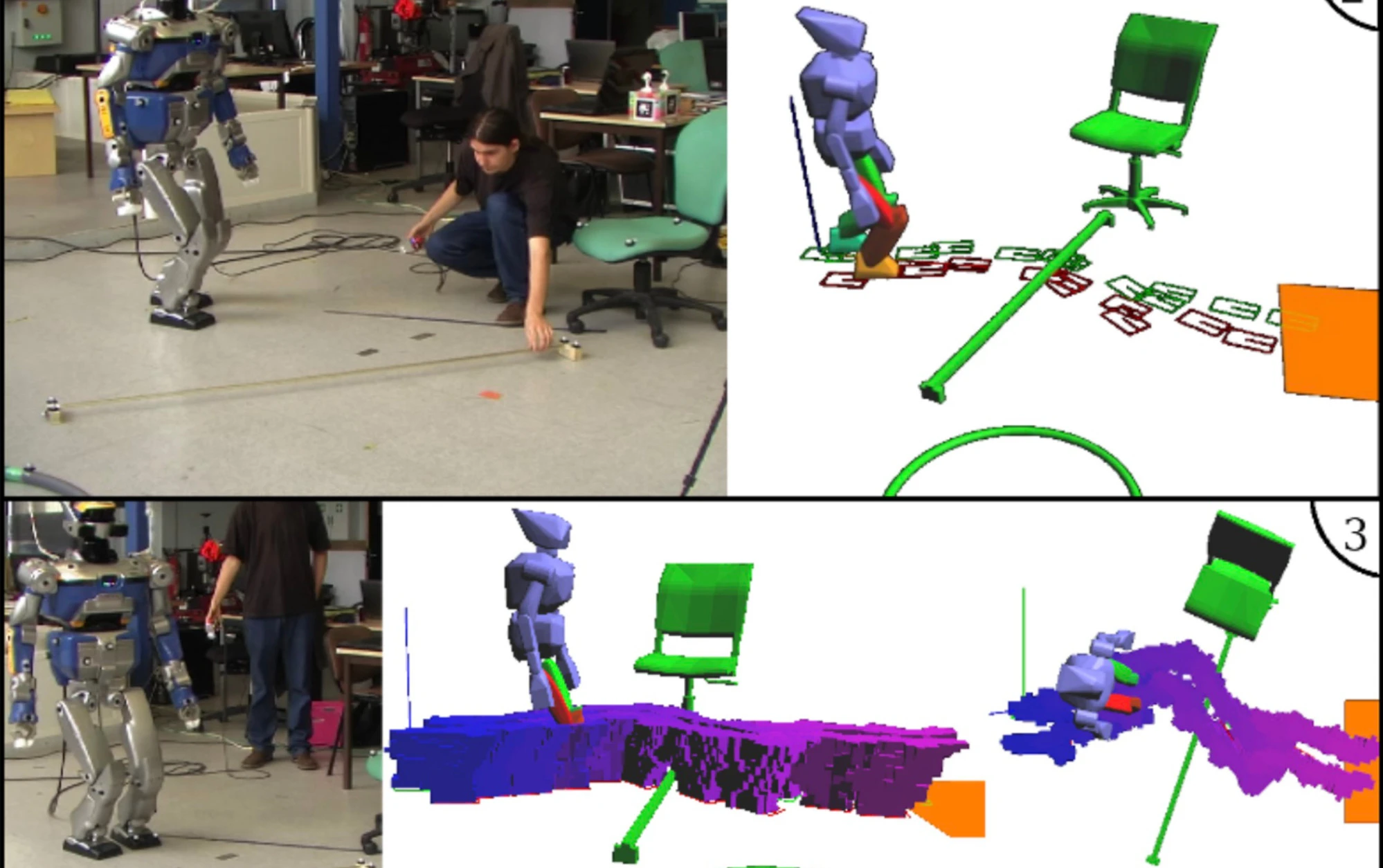
Générateur de motifs de marche
Avec Andrei Herdt et Pierre-Brice Wieber, l’ approche que nous avons développé est de refléter la faisabilité de transition entre deux positions de pieds dans l’espace du pendule inversé linéaire. Cela a l’avantage énorme de décider dans un espace à 6D dimension la meilleure trajectoire à réaliser par un contrôleur corps complet.