Koroibot
Améliorer les capacités de marches des robots humanoïdes grâce à des modèles mathématiques, l'optimisation et l'apprentissage en s'inspirant de l'être humain.
Project Details
- Type : European Project - FP6
- Travail effectué : Motion generation/Whole body control
- Outils utilisés : Stack-of-Tasks, Metapod, jrl-walkgen
- Fini en : 2016
- Concepts : Model Predictive Control / Walking / Learning
- Partenaires : University of Heidelberg, University of Tübingen
Koroibot
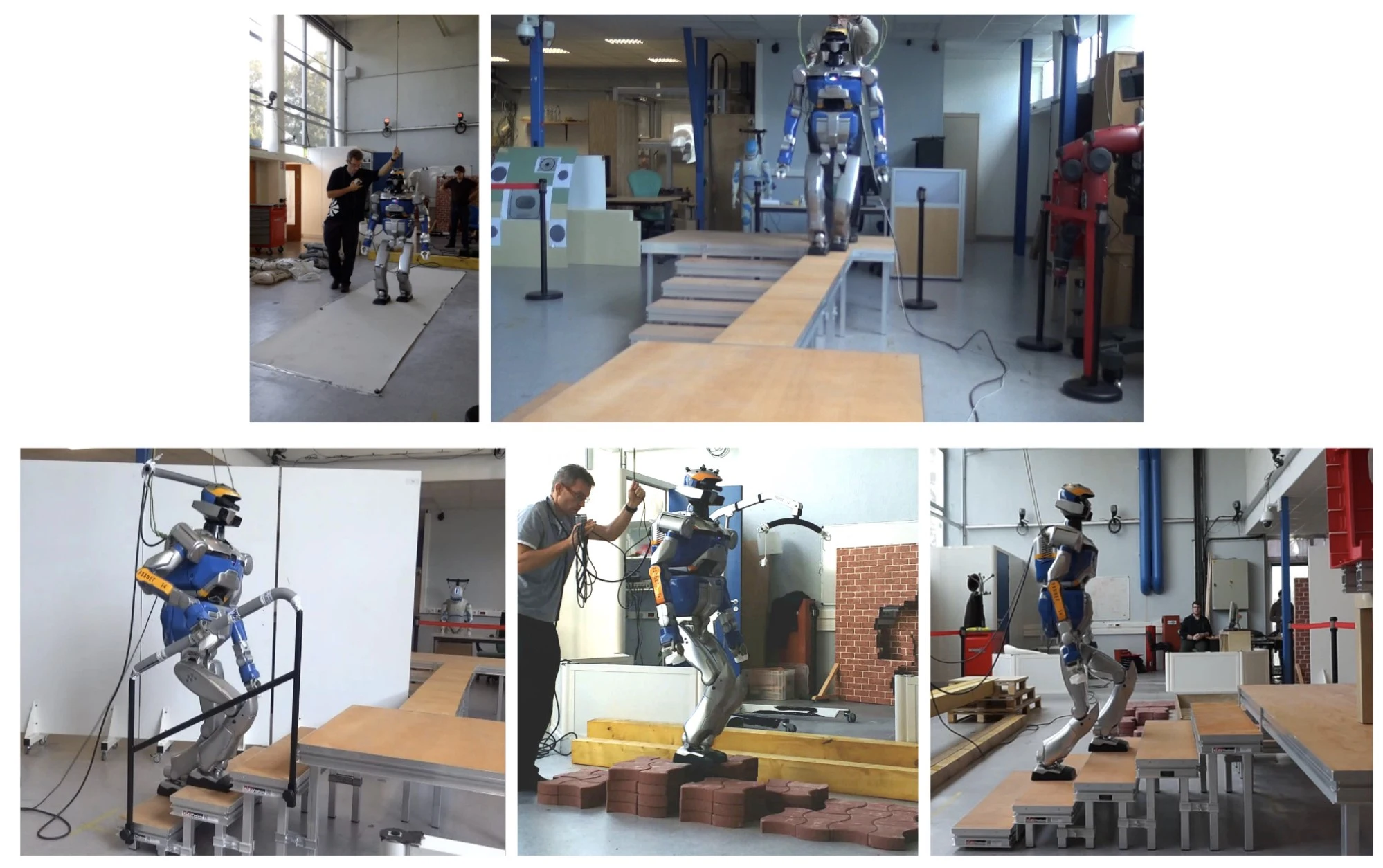
Le but de Koroibot a été de développer des techniques pour étendre les capacités de génération de mouvements pour les robots humnaoïdes dans des environnements contraints et de la montée des marches.
Dans le cadre du projet Koroibot nous avons développer une librairie de calcul des corps rigides basée sur la programmation par template de façon à calculer la dynamique lièe à un mouvement.