Software
R-RoMulOC
Randomized and Robust Multi-Objective Control toolbox
This toolbox is intended to gather multiple theoretical results obtained these past years in robust control. The aim is to have some simple functions for manipulating uncertain systems and building LMI optimization problems related to robust multi-objective control. The goal is not a commercial product but a platform for academic cooperative exchanges and possible demonstrations on application examples.
Functionalities
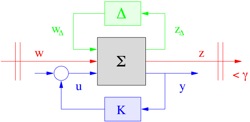
The package includes uncertain modeling facilities and associated robust analysis methods. The considered models are affine polytopic (including parallelotopic and interval systems) and LFTs (the uncertainty is modeled as a feedback on some nominal system). In this case the uncertain operator can be {X,Y,Z}-dissipative (this formulation includes the norm-bounded and positive real cases) polytopic (including special features for parallelotopic and interval formulations) or any block-diagonal structure of such operators.
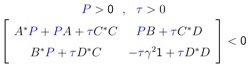
The analysis tools are Lyapunov based and include randomized features. They go beyond the quadratic stability framework and include several PDLF-based (parameter-dependent Lyapunov function) methods. Robustness is analyzed with respect to stability (for continuous or discrete-time systems) as well as to pole location, H-infinity, H2 and impulse-to-peak performances. The numerical framework is semi-definite programming (SDP). Thanks to the YALMIP parser all available SDP solvers can be used.
Downloads and more information

SeDuMi Interface
A user-friendly free Matlab package for defining optimisation problems over Linear Matrix Constraints (LMCs). It includes both Inequalities (LMIs) and Equalities (LMEs). It acts as an interface for the Self-Dual-Minimisation package SeDuMi developed by Jos F. Sturm.
The functionalities of SeDuMi Interface are the following
Declare an LMC problem.
Five Matlab functions allow to define completely an LMC problem which can be characterised by variables, equality constraints, inequality constraints and a linear objective:
sdmpb: initialise the LMC problem
sdmvar: declare the matrix variables
sdmlme, sdmeq: declare the equality constraints
sdmlmi, sdmineq: declare the inequality constraints
sdmobj: declare the linear objective
Solve an LMC problem.
A unique function, sdmsol, calls the SeDuMi solver. Options allow to tune the solver parameters.
Modify an LMC problem.
At any moment it is possible to append an LMC problem by adding variables, inequalities or linear terms to the objective. Moreover, the sdmset function allows to freeze matrix variables to specified values.
Analyse the solution issued from the solver. For all (feasible or not) problems, the solver outputs the last computed iterate (get). SeDuMi Interface allows to analyse this result in a convivial display. The solution is displayed directly in matrix format and indicators show which inequality constraints are satisfied.
Last release
Latest version is 1.04 released September 13, 2002
SeDuMiInt104.tar.gz.,
SeDuMiInt104.zip
SeDuMi Interface developement is stopped since 2002. A recomended alternative package is
YALMIP by Johan Löfberg.
Citation
Y. Labit, D. Peaucelle and D. Henrion,