N. Ramuzat,
O. Stasse,
S. Boria,
IEEE Robotics and Automation Letters,
2022,
Vol (7),
Issue (2),
HAL
Publisher
Bib
PDF
Abstract:
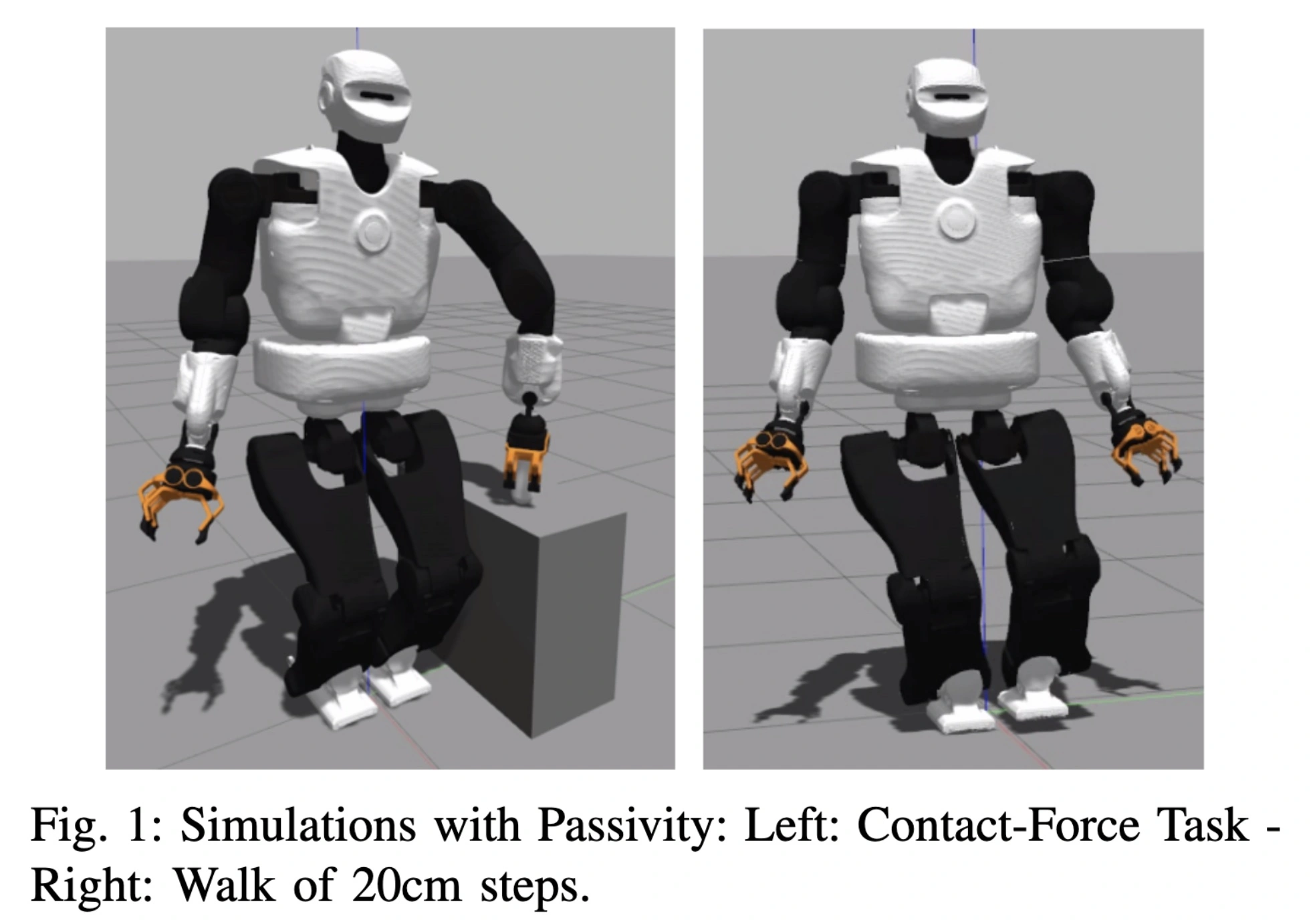
This letter presents a passivity-based inverse dynamics (ID) controller using a global energy tank. The proposed control approach allows us to achieve a safe multi-contact scenario on a torque controlled humanoid robot. The controller is primarily a task space ID quadratic programming (QP) which efficiently computes the reference torque satisfying a non-hierarchical set of tasks. Our work extends this controller by adding a global energy tank modulating the task gains, with power regulation, to ensure the passivity of the system. This method combines the benefits of the ID controller, which computes an optimal reference without joint torque feedback, and of the passivity-based system, which is robust to model uncertainties and external disturbances. The robustness of our framework is demonstrated in Gazebo simulations, where the robot TALOS achieves a multi-contact scenario and a 20 cm step walk, with objectives in the Cartesian and configuration spaces, in torque control. The implementation of this controller is open-source.