O. E. Ramos,
G. Mauricio,
N. Mansard,
O. Stasse,
J. -B. Hayet,
P. Soueres,
Int. Journal of Humanoid Robotics,
2014,
Vol (11),
Issue (2),
HAL
Publisher
Bib
PDF
Abstract:
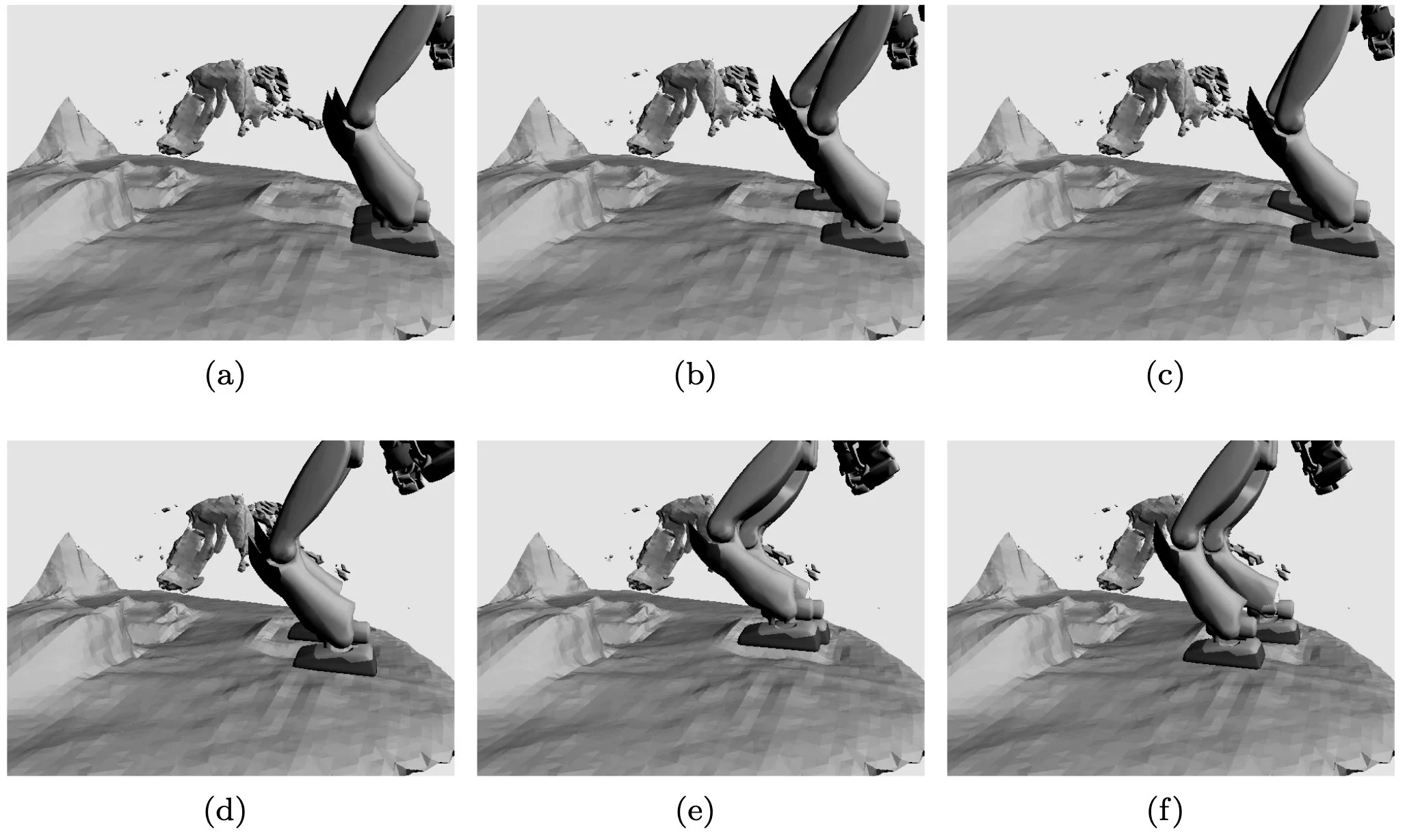
This work presents a method to handle walking on rough terrain using inverse dynamics control and information from a stereo vision system. The ideal trajectories for the center of mass (CoM) and the next position of the feet are given by a pattern generator. The pattern generator is able to automatically find the footsteps for a given direction. Then, an inverse dynamics control scheme relying on a quadratic programming optimization solver is used to let each foot go from its initial to final position, controlling also the CoM and the waist. A 3D model reconstruction of the ground is obtained through the robot cameras located on its head as a stereo vision pair. The model allows the system to know the ground structure where the swinging foot is going to step on. Thus, contact points can be handled to adapt the foot position to the ground conditions.