N. Perrin,
O. Stasse,
L. Baudouin,
F. Lamiraux,
E. Yoshida,
IEEE Transactions on Robotics,
2012,
Vol (28),
Issue (2),
pages (427-439),
HAL
Publisher
Bib
PDF
Abstract:
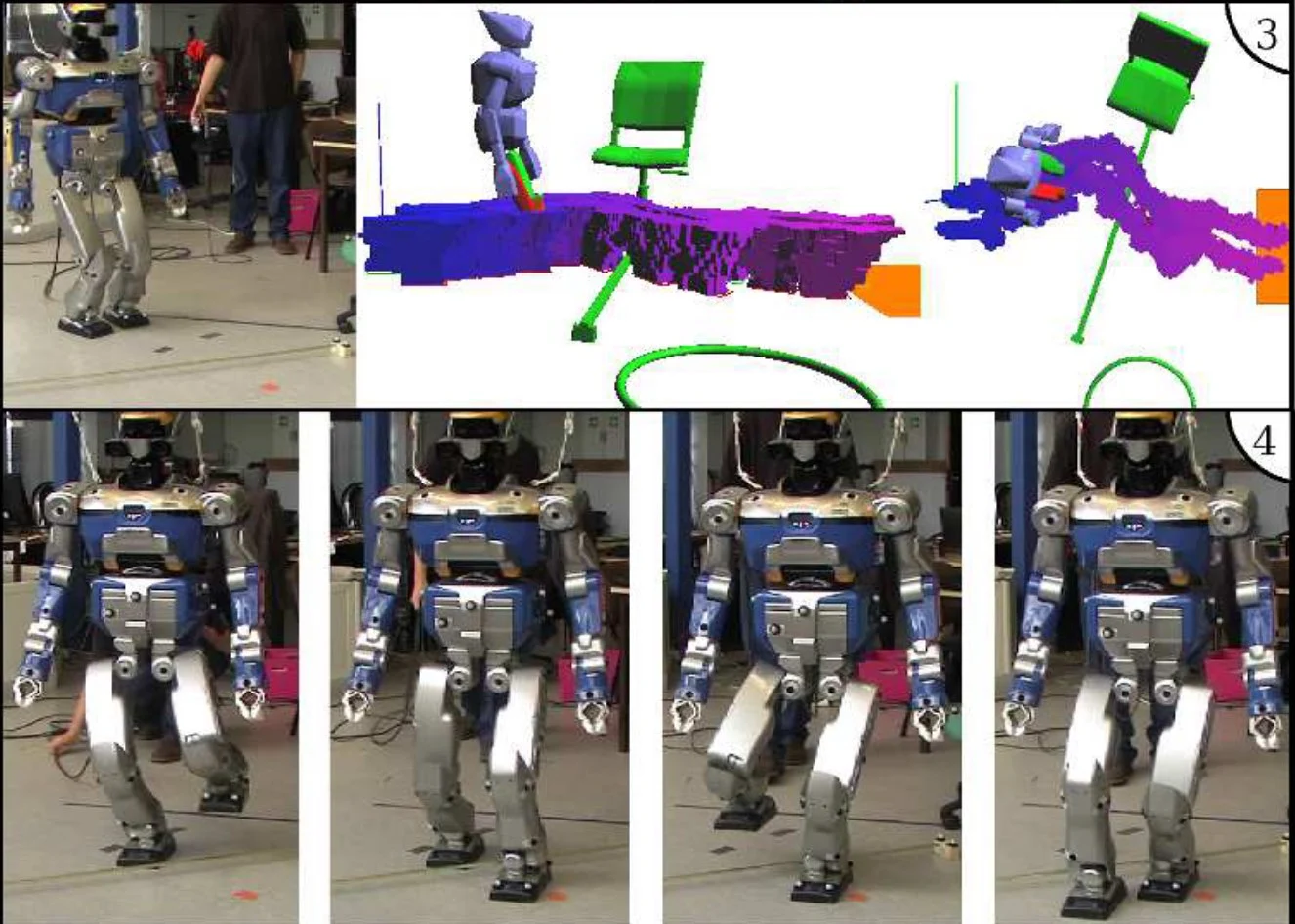
In this paper, we propose a novel and coherent framework for fast footstep planning for legged robots on a flat ground with 3-D obstacle avoidance. We use swept volume approximations that are computed offline in order to considerably reduce the time spent in collision checking during the online planning phase, in which a rapidly exploring random tree variant is used to find collision-free sequences of half-steps (which are produced by a specific walking pattern generator). Then, an original homotopy is used to smooth the sequences into natural motions, gently avoiding the obstacles. The results are experimentally validated on the robot HRP-2.