Journals
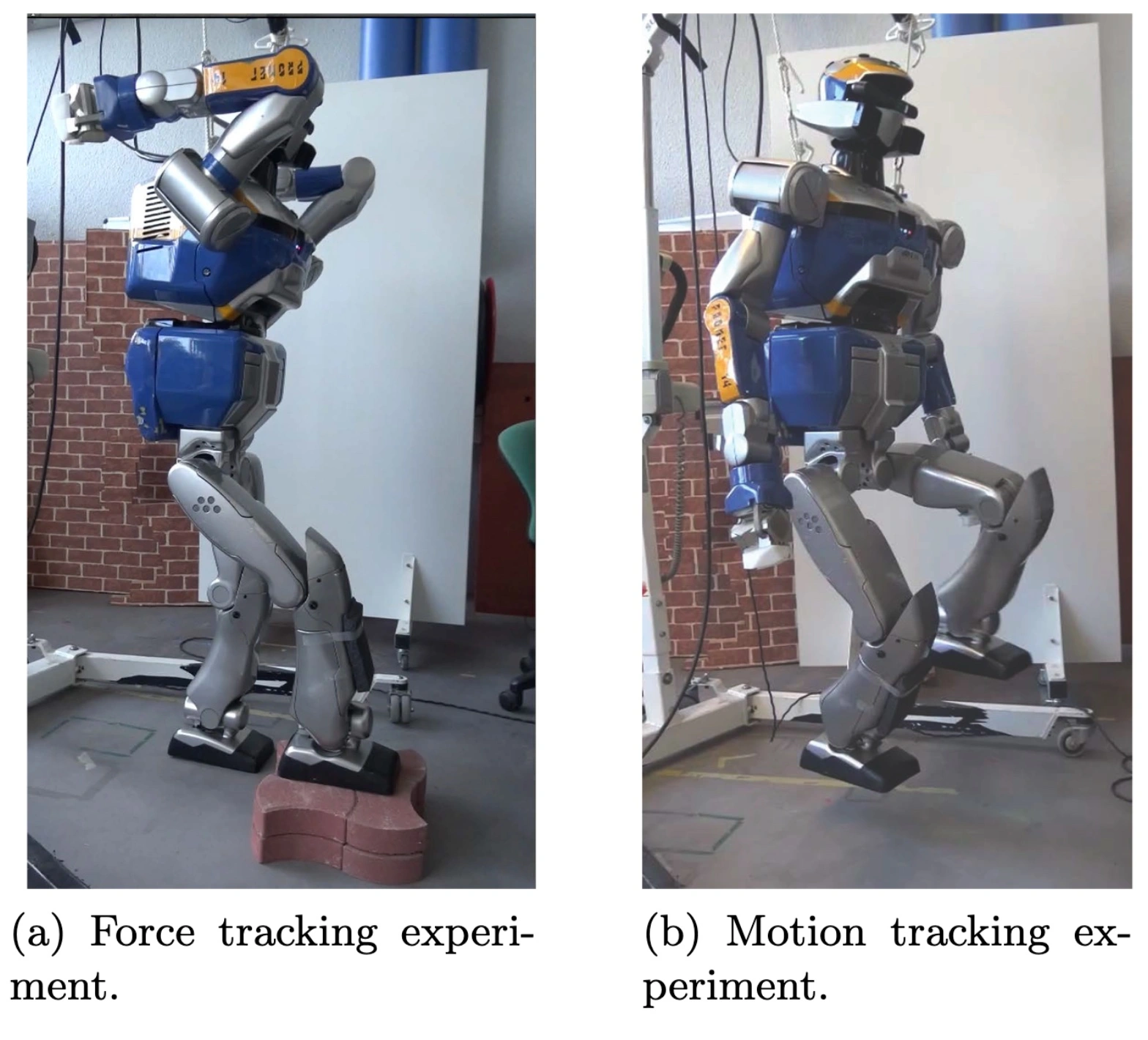
COCoMoPL: A Novel Approach for Humanoid Walking Generation Combining Optimal Control, Movement Primitives and Learning and its transfer to the real robot HRP-2
D. Clever,
M. Harant,
K. Mombaur,
M. Naveau,
O. Stasse,
D. Endres,
IEEE/RAS Robotics and Automation Letters, 2017
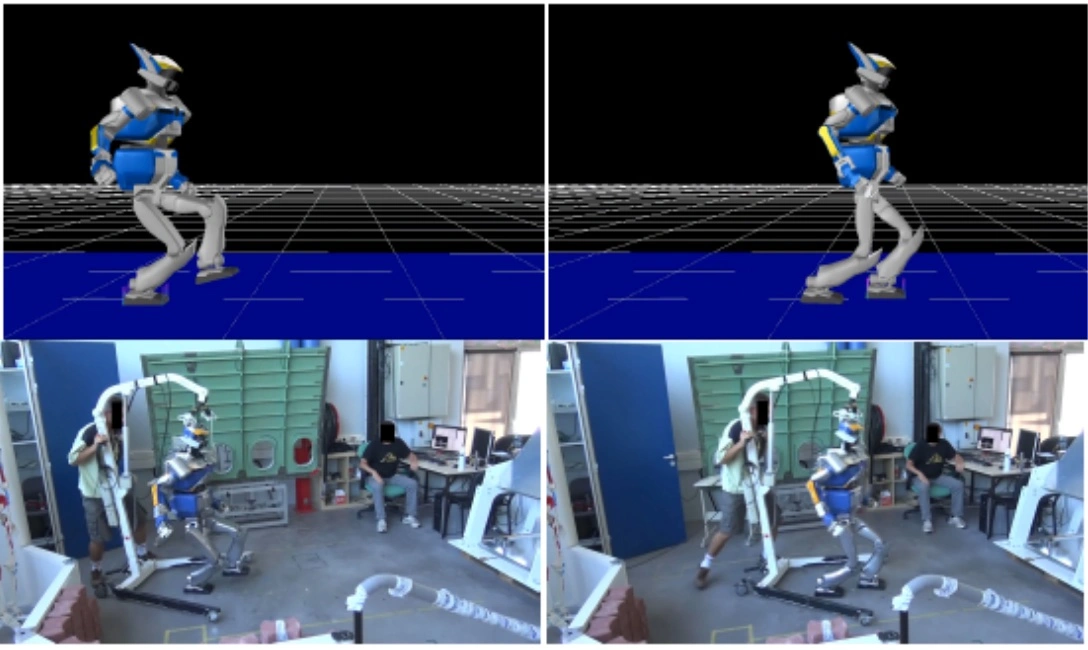
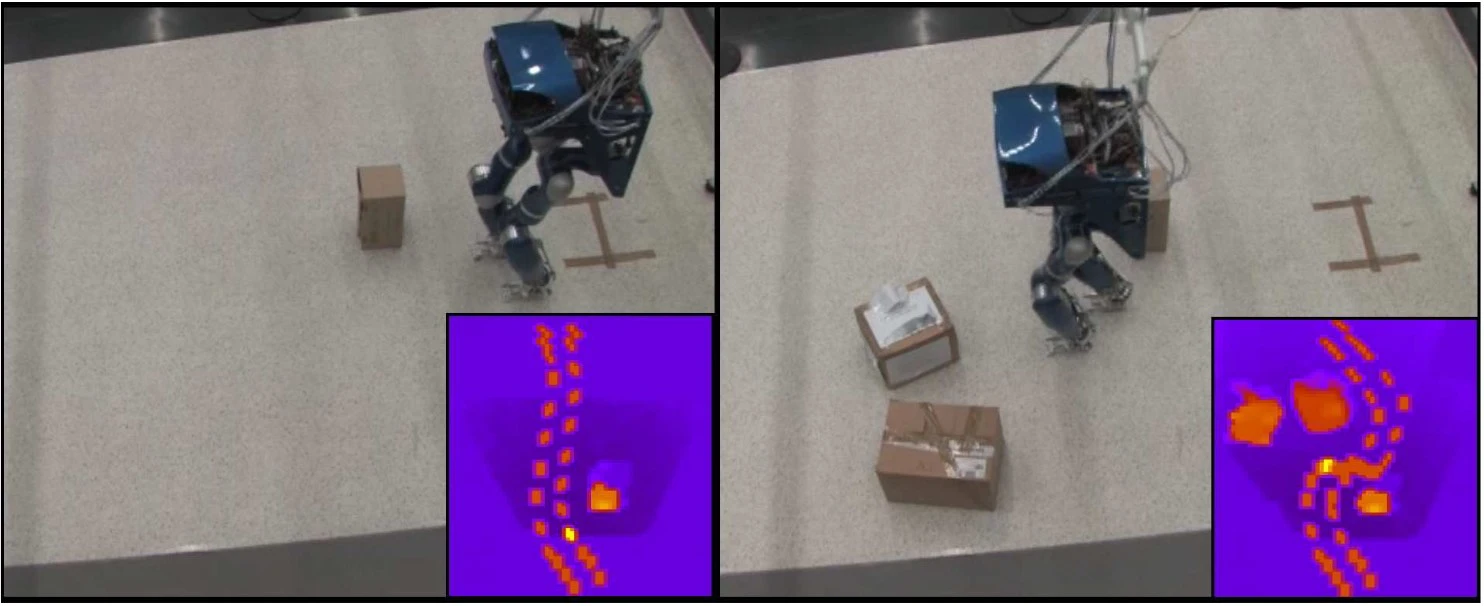
Continuous Legged Locomotion Planning
N. Perrin,
C. Ott,
J. Englsberger,
O. Stasse,
F. Lamiraux,
D. G. Caldwell,
IEEE Transactions on Robotics, 2017
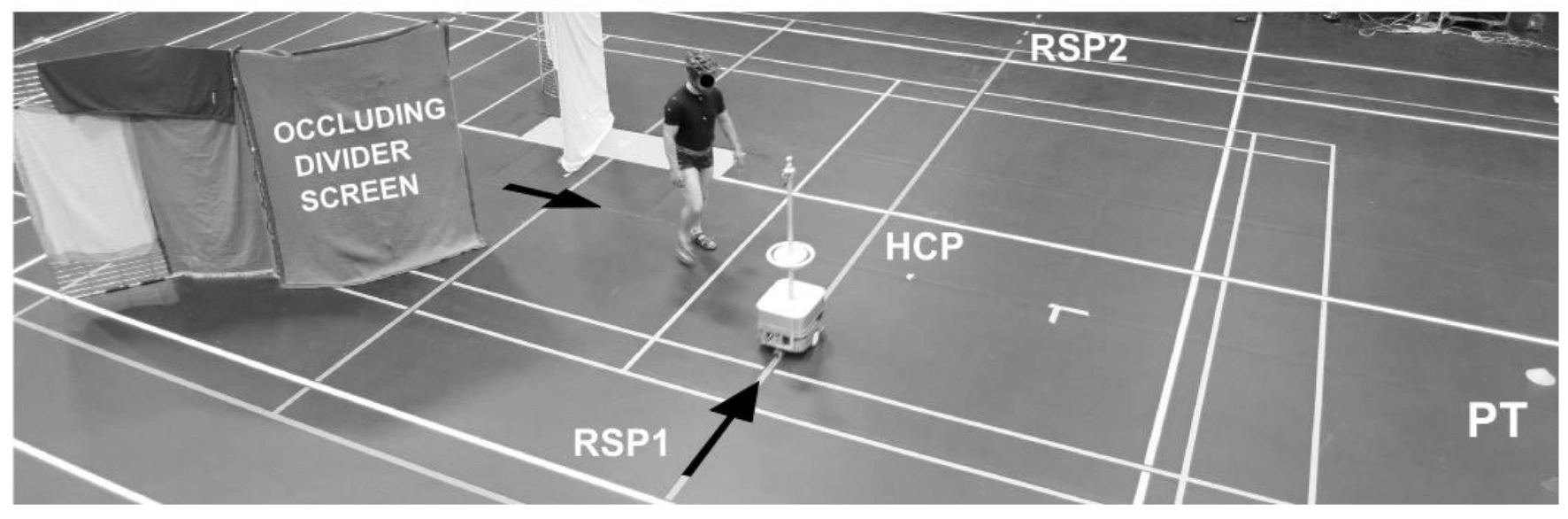
How do walkers avoid a mobile robot crossing their way ?
C. Vassallo,
A. -H. Olivier,
P. Souères,
A. Crétual,
O. Stasse,
J. Pettré,
Gait and Posture, 2017
Implementing Torque Control with High-Ratio Gear Boxes and without Joint-Torque Sensors
A. Del Prete,
N. Mansard,
O. E. Ramos,
O. Stasse,
F. Nori,
International Journal of Humanoid Robotics, 2016