A. Mukovskiy,
C. Vassallo,
M. Naveau,
O. Stasse,
P. Soueres,
M.-A. Giese,
Robotics and Autonomous Systems,
2017,
Vol (91),
pages (270-283),
HAL
Publisher
Bib
PDF
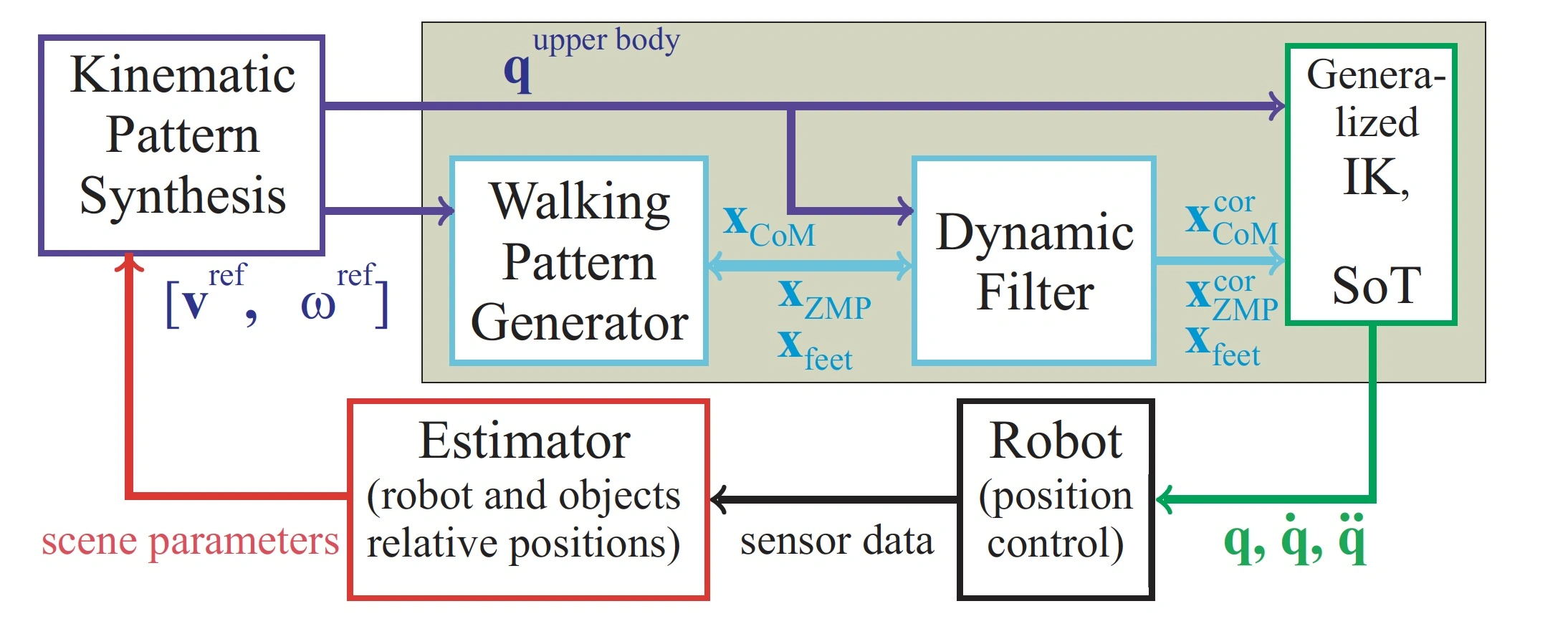
Abstract:
Skilled human full-body movements are often planned in a highly predictive manner. For example, during walkingwhile reaching towards a goal object results in steps and body postures are adapted to the goal position already multiple steps before the goal contact. The realization of such highly predictive behaviors for humanoid robots is a challenge because standard approaches, such as optimal control, result in computation times that are prohibitive for the predictive control of complex coordinated full-body movements over multiple steps. We devised a new architecture that combines the online-planning of complex coordinated full-body movements, based on the flexible combination oflearned dynamic movement primitives, with a Walking Pattern Generator (WPG), based on Model Predictive Control(MPC), which generates dynamically feasible locomotion of the humanoid robot HRP-2. A dynamic filter corrects the Zero Moment Point (ZMP) trajectories in order to guarantee the dynamic feasibility of the executed behavior takinginto account the upper-body movements, at the same time ensuring an accurate approximation of the planned motion trajectories. We demonstrate the high flexibility of the chosen movement planning approach, and the accuracy andfeasibility of the generated motion. In addition, we show that a naıve approach, which generates adaptive motion by using machine learning methods by the interpolation between feasible training motion examples fails to guarantee the stability and dynamic feasibility of the generated behaviors.