A. Del Prete,
N. Mansard,
O. E. Ramos,
O. Stasse,
F. Nori,
International Journal of Humanoid Robotics,
2016,
Vol (13),
Issue (1),
HAL
Publisher
Bib
PDF
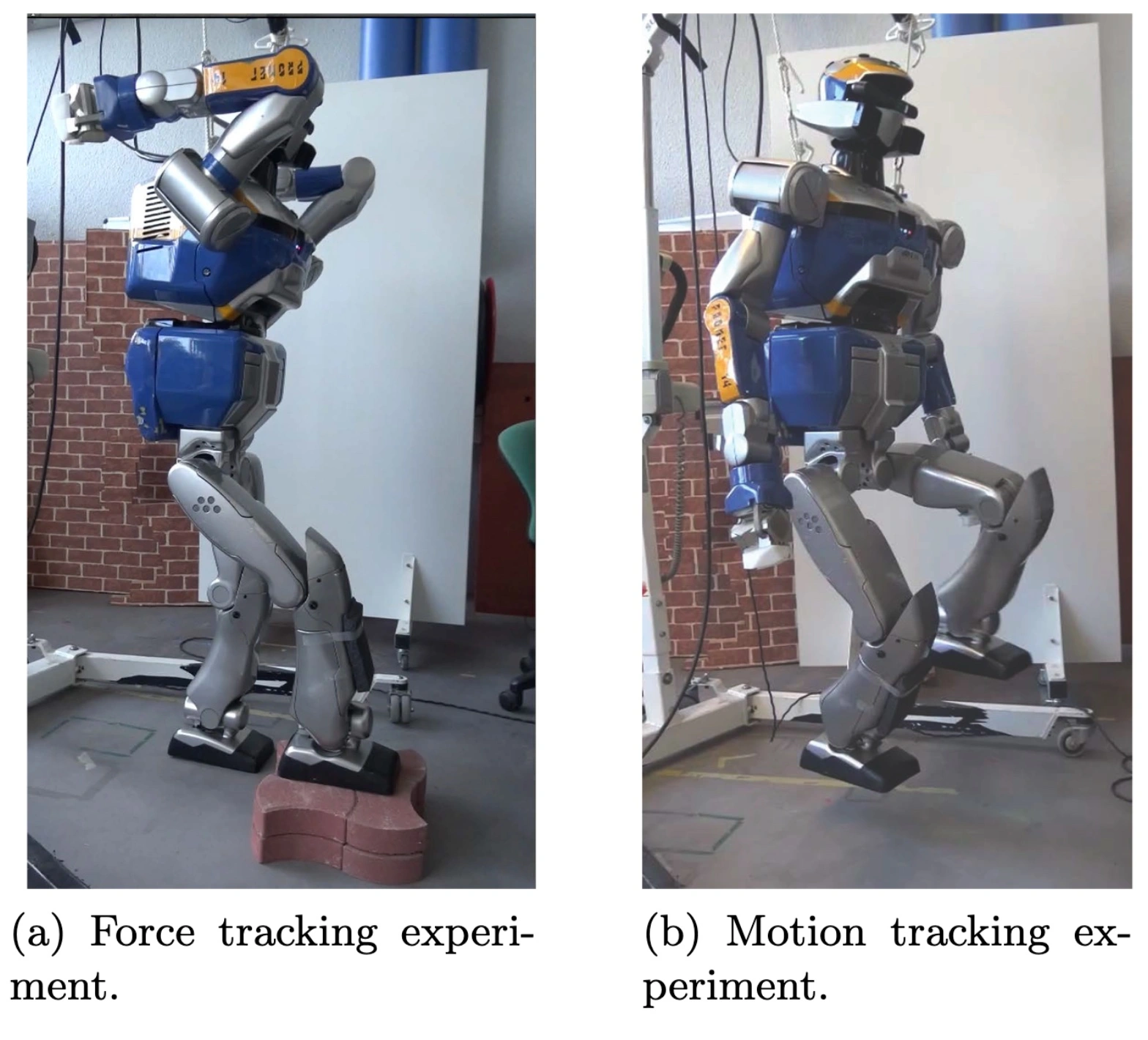
Abstract:
This paper presents a complete framework (estimation, identification and control) for the implementation of joint-torque control on the humanoid robot HRP-2. While torque control has already been implemented on a few humanoid robots, this is one of the first implementations of torque control on a robot that was originally built to be position controlled (iCub[1] and Asimo[2] being the first two, to the best of our knowledge). The challenge comes from both the hardware, which does not include joint-torque sensors and presents large friction due to the high-ratio gear boxes, and the software interface, which only accepts desired joint-angle commands (no motor current/voltage control). The contribution of the paper is to provide a complete methodology that is very likely to be reproduced as most robots are designed to provide only position control capabilities. Additionally, the method is validated by exhaustive experiments on one leg of the robot, including a comparison with the original position controller. We tested the torque controller in both motion control and cartesian force control. The torque control can track better a reference trajectory while using lower values for the feedback gains (up to 25%). Moreover, we verified the quality of the identified motor models by analyzing the contribution of the feedforward terms of our torque controller, which dominate the feedback terms.