A. J. Davison,
I. Reid,
N. Molton,
O. Stasse,
IEEE Transactions on Pattern Analysis and Machine Intelligence,
2007,
Vol (29),
pages (1052-1067),
Bib
Abstract:
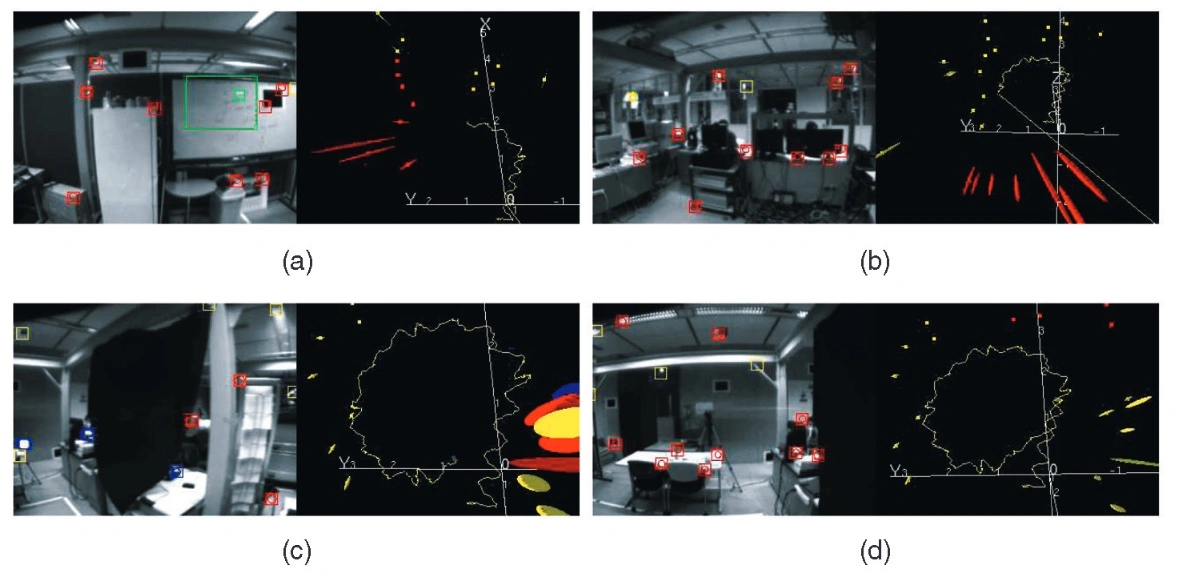
We present a real-time algorithm which can recover the 3D trajectory of a monocular camera, moving rapidly through apreviously unknown scene. Our system, which we dubMonoSLAM, is the first successful application of the SLAM methodology from mobile robotics to the “pure vision” domain of a single uncontrolled camera, achieving real time but drift-free performance inaccessibleto Structure from Motion approaches. The core of the approach is the online creation of a sparse but persistent map of natural landmarks within a probabilistic framework. Our key novel contributions include anactiveapproach to mapping and measurement, theuse of a general motion model for smooth camera movement, and solutions for monocular feature initialization and feature orientationestimation. Together, these add up to an extremely efficient and robust algorithm which runs at 30 Hz with standard PC and camera hardware. This work extends the range of robotic systems in which SLAM can be usefully applied, but also opens up new areas. Wepresent applications ofMonoSLAMto real-time 3D localization and mapping for a high-performance full-size humanoid robot and liveaugmented reality with a hand-held camera.