D. Clever,
M. Harant,
K. Mombaur,
M. Naveau,
O. Stasse,
D. Endres,
IEEE/RAS Robotics and Automation Letters,
2017,
Vol (2),
Issue (2),
pages (977-984),
HAL
Publisher
Bib
PDF
Abstract:
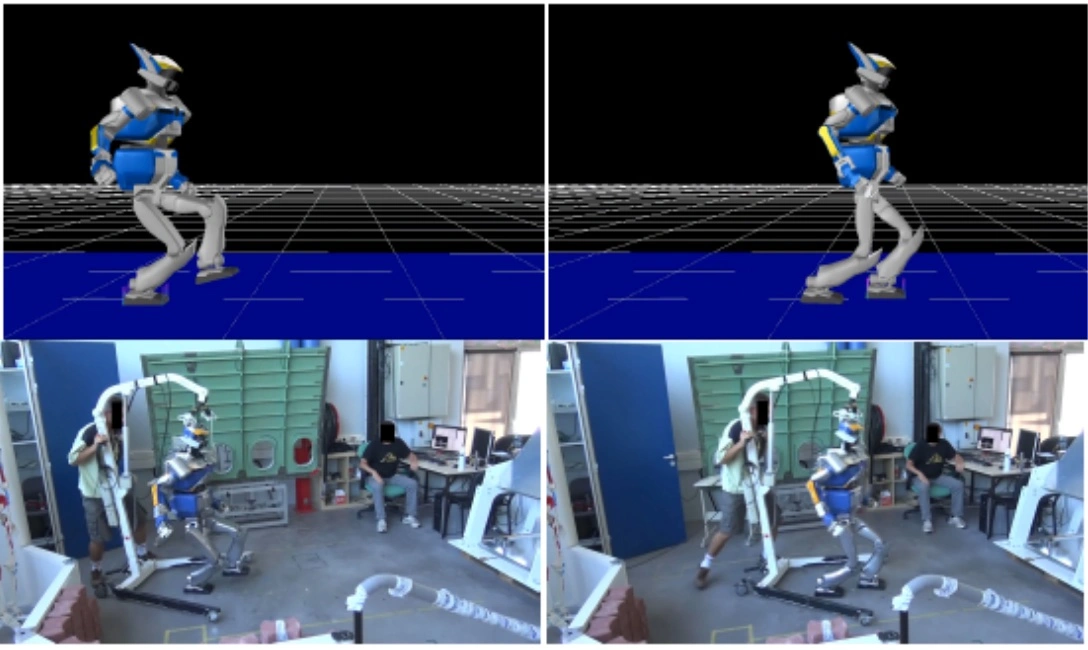
COCoMoPL is a recently developed approach Combining Optimal Control, Movement Primitives and Learning for the generation of humanoid walking motions. It solves optimal control problems based on detailed dynamic models of the robot for a variety of walking parameters and uses the solutions as training data to create movement primitives that are very close to feasibility and optimality. These can be employed to synthesize complex walking sequences for humanoid robots online in a very efficient way. We demonstrate, for the first time, that COCoMoPL works on a real humanoid robot, here HRP-2 with 36 DOF and 30 position controlled actuators. To this end, it was necessary to significantly extend the existing approach by including transition steps into the training data, modify the movement primitives (MP) to admit these transitions, improve the representation of the ZMP MPs and tighten the transition conditions at the beginning/end of steps. We present a thorough validation of the method in simulation and on the real robot for a challenging sequence of movements. We also compare the characteristics of movements after each step of the methodology.