R(obotic)-Blink:
Making a humanoid robot reacting in a blink of an eye
Project Details
- Type : ANR Project
- What We Did : Whole body control/Walking
- Tools Used : Stack-of-Tasks, jrl-walkgen
- Completed on : 2011
- Skills : Model Predictive Control / Walking / Whole body control
- Partners : Florent Lamiraux, Pierre-Brice Wieber, Florent Lamiraux
R-Blink
The goal of this project was to endow humanoid robot with very fast decision making for motion generation.
Motion Planning
With Nicolas Perrin we developed motion planning techniques based on a very simple idea: is it possible to build an oracle for the steering part of motion planning ? This way testing if two states can be connected would be very fast and decide which path to take would be solved very efficiently. In order to build such oracle we used approximation techniques to learn if a transition between two states in the task space are feasible.
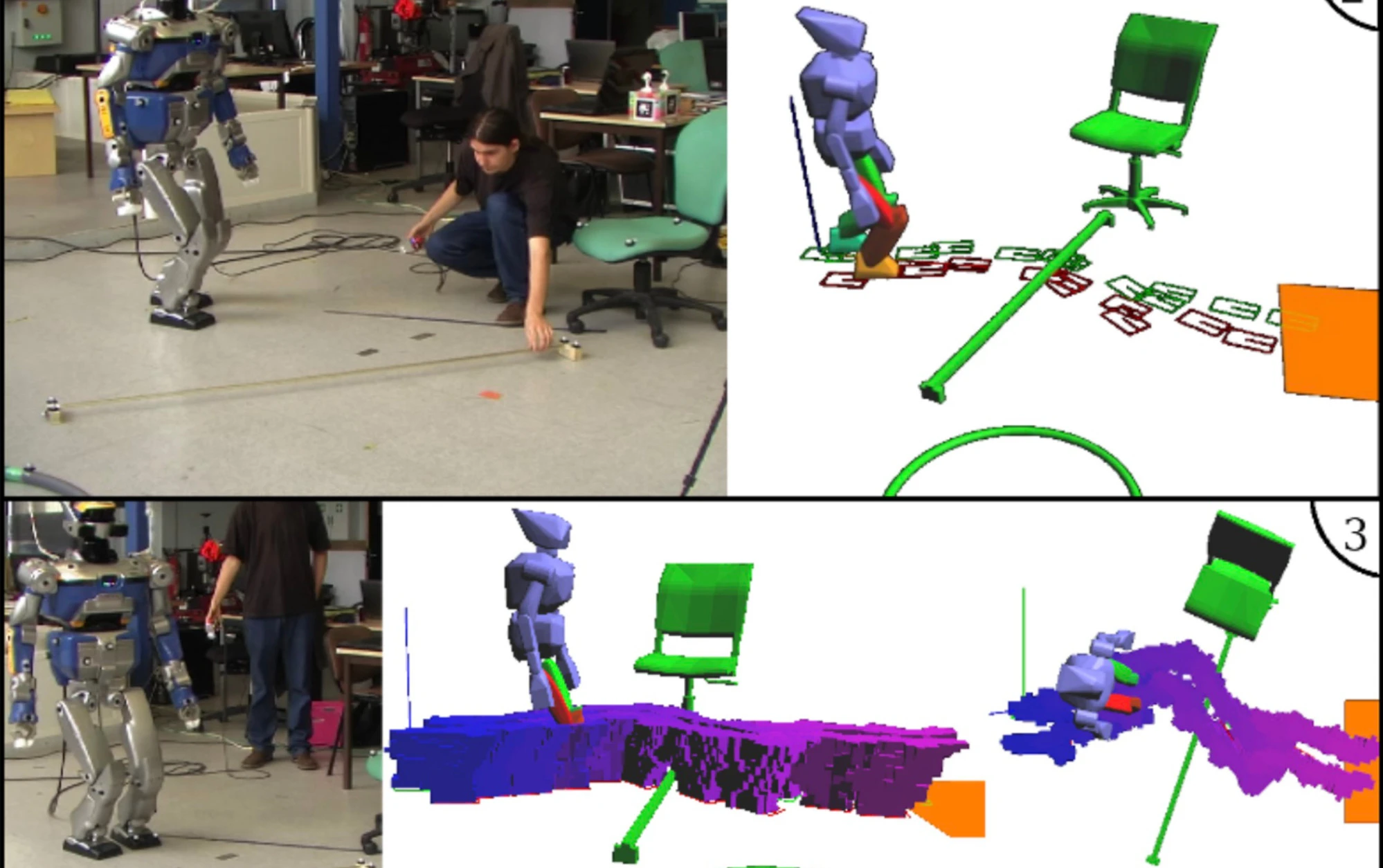
Walking pattern generator
With Andrei Herdt and Pierre-Brice Wieber, the approach that was developped is to reflect the feasibility transition between two foot steps positions in the space of the Linear Inverted Pendulum. This has the great advantage of deciding in a 6D dimensional space the best trajectory to be realized by the whole body controller.