Koroibot
Improving humanoid walking capabilities by human-inspired mathematical models, optimization and learning
Project Details
- Type : European Project - FP6
- What We Did : Motion generation/Whole body control
- Tools Used : Stack-of-Tasks, Metapod, jrl-walkgen
- Completed on : 2016
- Skills : Model Predictive Control / Walking / Learning
- Partners : University of Heidelberg, University of Tübingen
Koroibot
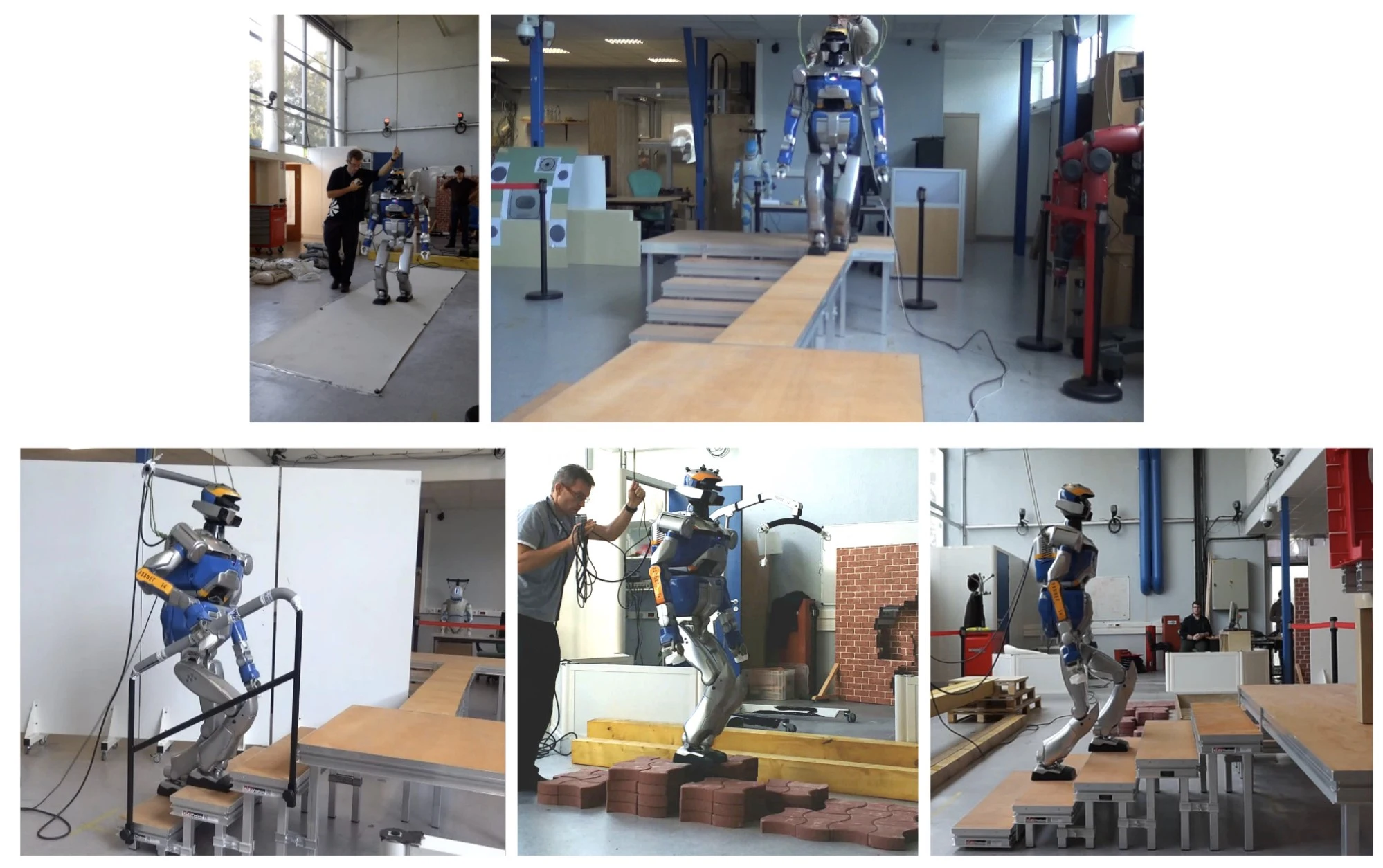
The goal of Koroibot was to developed techniques to expand motion generation for humanoid robot in constrained environment and stair climbing.
In Koroibot we developped an efficient rigid body mechanical library based on template programming in order to compute the dynamics of a motion.