Goal
The goal of this research topic is to make humanoid robots able to perform every-day tasks in environments designed for human beings. Our research work focus on geometric motion planning, taking into account kinematic and dynamic constraints.
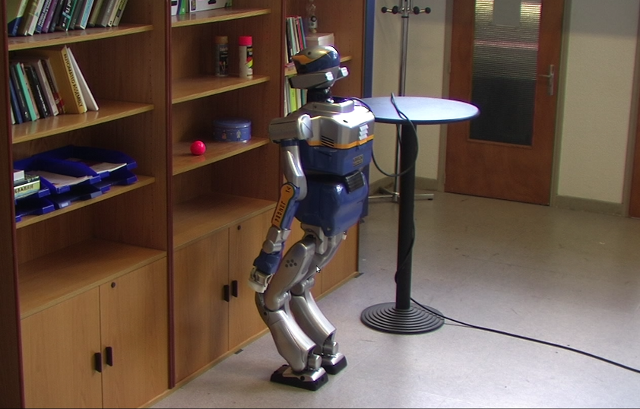
Humanoid robot HRP2 |
Research Domains
-
Motion Planning
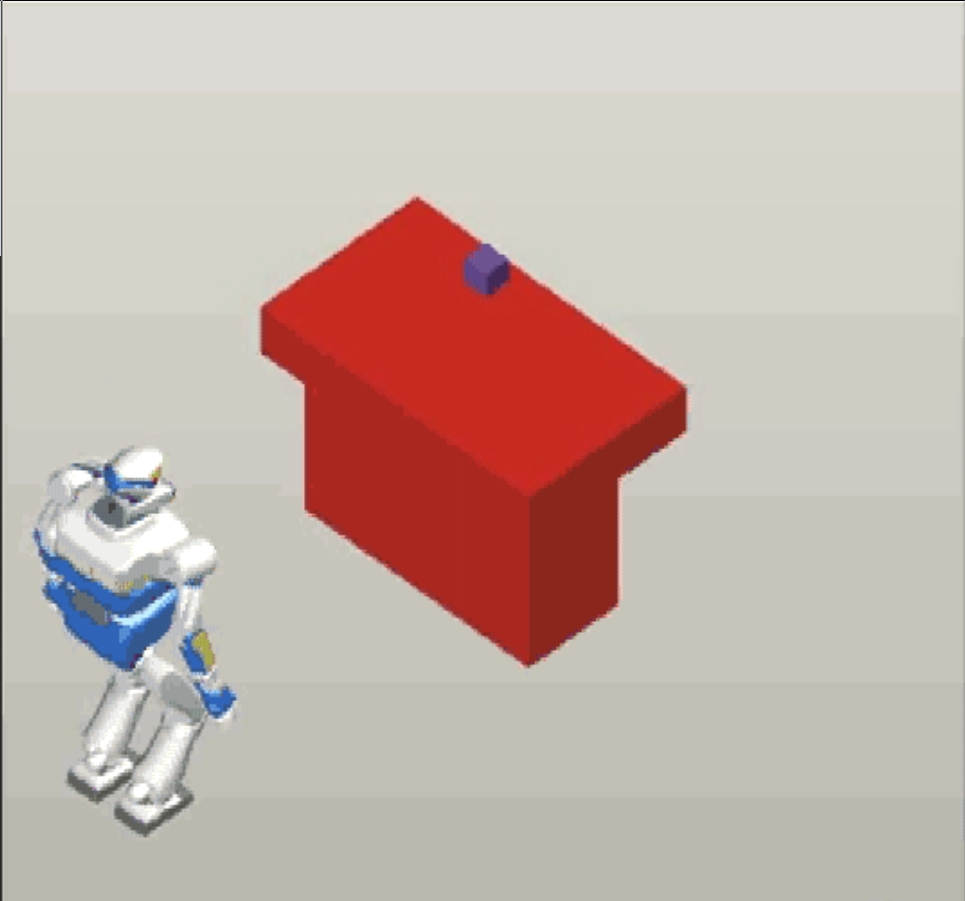
We conduct research aiming at making a humanoid robot able to perform a large range of motions in order to achieve various tasks in in-door environments, for instance,- walking in a cluttered environment,
- grasping an object,
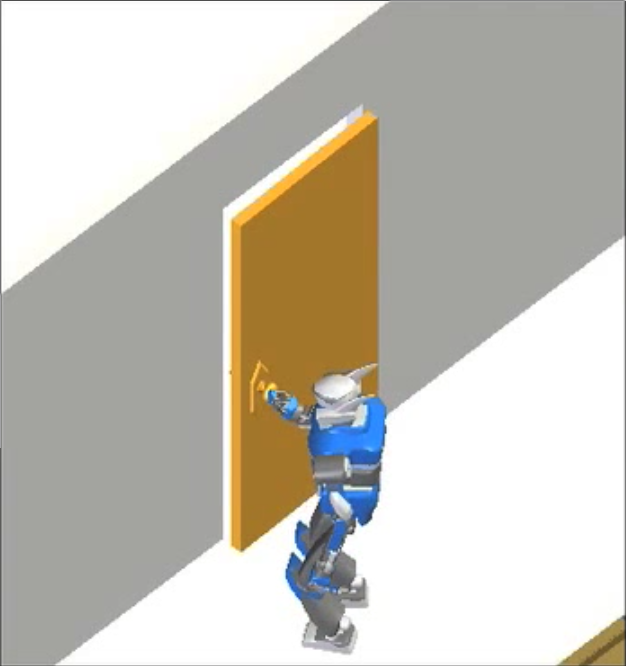
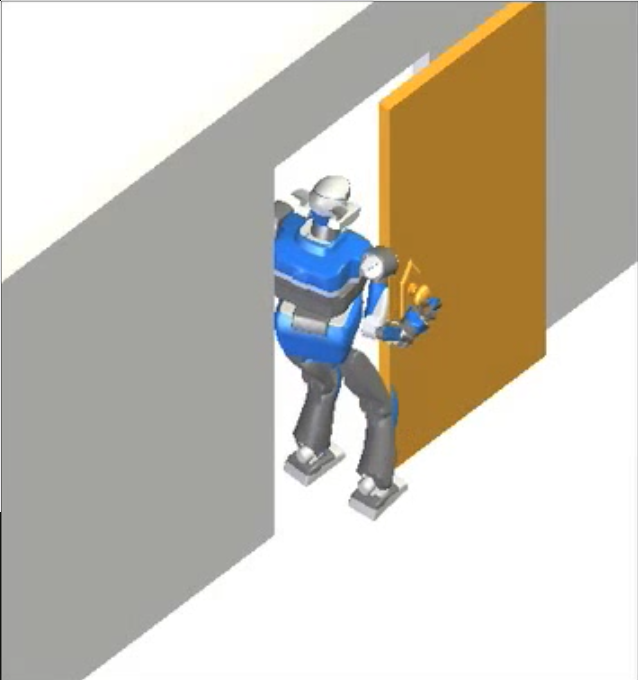
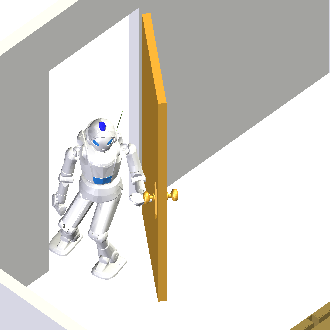
- going through a door,
- opening or closing a window...
-
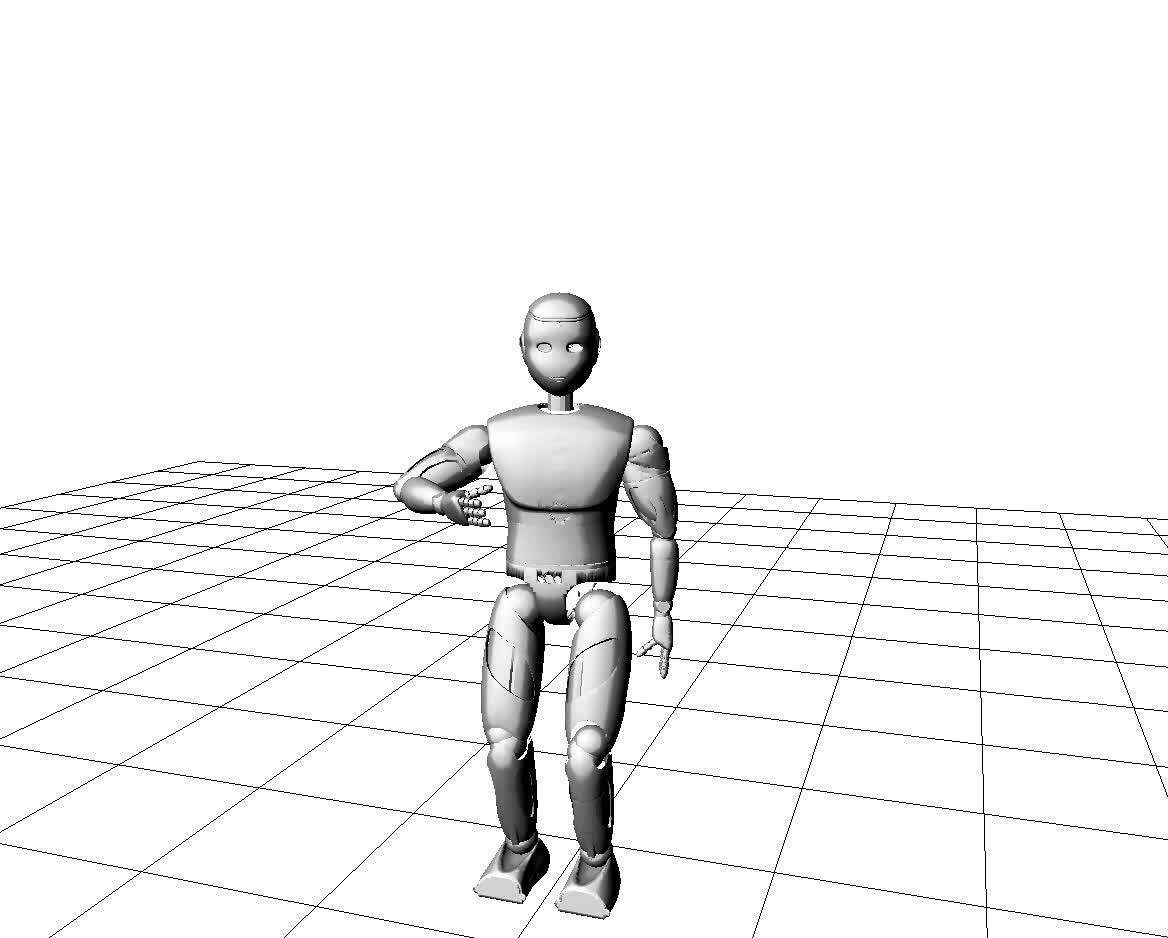
Whole-Body motion planning
hpp-gik is a software SDK that implements task-based inverse kinematics. The sofware is released under license LGPL and can be found on github. To use this SDK, it is recommended to download the tutorial The movie below shows a simple motion produced by hpp-gik including whole-body stepping and upper-body tasks.