We have formulated and investigated a novel problem called Mutual Localization with Anonymous Position Measures. This is an extension of Mutual Localization with Position Measures, with the additional assumption that the identities of the measured robots are not known. For certain configurations of the multi-robot system, the anonymity hypothesis causes a combinatorial ambiguity in the inversion of the measure equation, resulting in the existence of multiple solutions.
In [1],[2] we have developed a two-phase filter for solving the localization problem. The first phase uses MultiReg, an innovative algorithm aimed at obtaining sets of geometrically feasible relative pose hypotheses. Then, its output is processed by a data associator and a multiple EKF to rate and select the best hypothesis. We have studied the performance of the developed localization system using both simulations and real experiments.
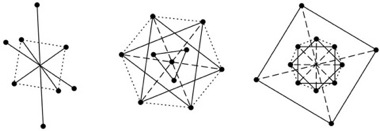
In [3], we have investigated more in the detail the structure of the problem. We have found a necessary and sufficient condition for the uniqueness of the geometrical solution based on the notion of rotational symmetry in the physical plane. We have also derived the relationship between the number of robots and the number of possible solutions, and we have classified the solutions in a number of equivalence classes which is linear with the number of robots.
Finally, we have developed a control law that effectively breaks symmetric formations so as to guarantee the unique solvability of the problem. We have demonstrated the performance of this control law through simulations.
In [4],[5] we have modified our localization system in a probabilistic sense, first by using particle filters (rather than EKFs) to compute the current belief on the robots' relative poses, and then by modifying MultiReg so that is can use this information as a feedback. This has several advantages, mainly (i) particle filters are intrinsically multi-modal and therefore do not require the use of heuristics for data association (ii) the new framework allows MultiReg to focus on solutions that are most likely according to the current belief, filtering out the effects of rotational symmetries that may arise in the system and avoiding the associated complexity increase. In practice, this results in a drastic reduction of the execution time whenever the task requires a rotational symmetric robot deployment (e.g., encirclement, escorting, etc). The proposed method is experimentally validated.
The method has been extended to the case where only bearing measurements are available (e.g., in the case the robots are equipped with a monocular camera) for the 2D [6] and 3D case [7][8][9].
For an application of Mutual Localization with Anonymous Position Measures in a multi-robot task execution, see also the encirclement page.
Experiments
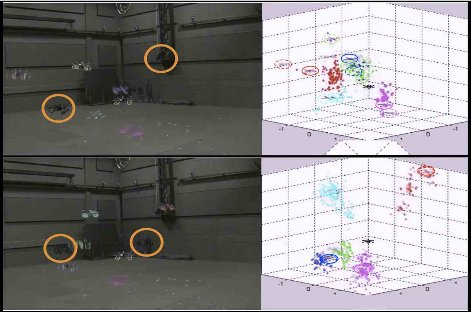
Two mutual localization experiments (mp4 clip)
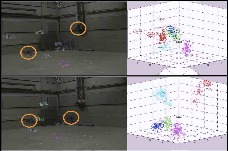
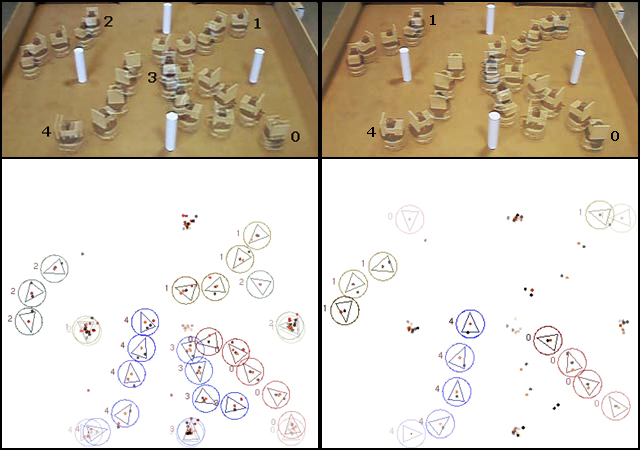
In this video, we show two mutual localization experiments performed on a team of five Khepera III robots. A wireless card and a Hokuyo URG-04LX laser rangefinder have been added to the standard equipment of each robot. In both experiments, we show the robot arena and the estimates computed by robot 4. The highly symmetric and ambiguous starting configuration causes the initial estimates to be wrong. However, when the robots start moving the symmetry is broken and the right estimates are obtained in a few seconds. In the first experiment, all five robots participate to the mutual localization process, while the peculiarity of the second experiment is that two robots do not participate, as they act as deceiving obstacles.
Five anti-simmetry control simulations (mp4 clip)
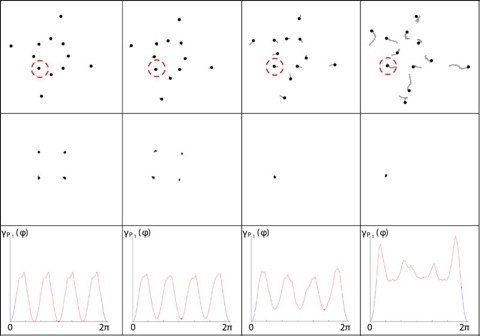
In this video, we show five simulations of anti-simmetry control. In all simulations, the robots start in a rotational symmetric configuration (hence ambiguous) and move under the action of the proposed control law. On the left, we show the evolution of the multi-robot system, while on the right we show the symmetry metric function, a function used to quantify the "distance" from rotational symmetry. We also show that the action of a random control law is much less effective.
Three anti-simmetry control experiments (mp4 clip)
Additional images
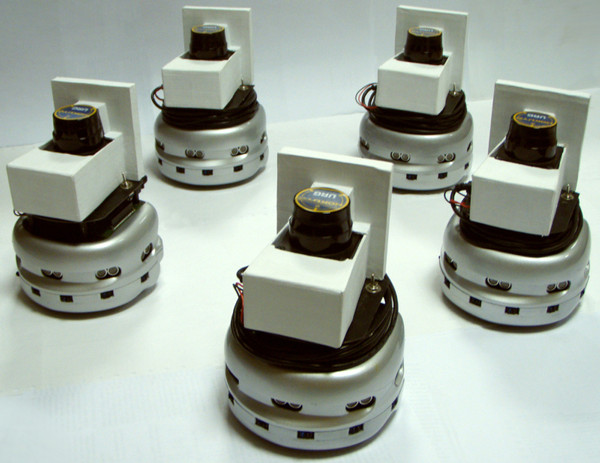
The team of 5 Khepera III used in our experiments. Around the URG-04LX a cardboard ‘hat’ is mounted to allow the feature extraction.
Algorithm used for the feature extraction.
Credits
Based upon the mutual localization page of "La Sapienza" robotics lab.
References
- , “Mutual Localization in a Multi-Robot System with Anonymous Relative Position Measures”, Department of Computer and System Sciences Antonio Ruberti, 2009.
- , “Mutual Localization in a Multi-Robot System with Anonymous Relative Position Measures”, in 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, St. Louis, MO, 2009, pp. 3974-3980.
- , “On the Solvability of the Mutual Localization Problem with Anonymous Position Measures”, in 2010 IEEE Int. Conf. on Robotics and Automation, Anchorage, AK, 2010, pp. 3193-3199.
- , “Mutual Localization in Multi-Robot Systems using Anonymous Relative Measurements”, The International Journal of Robotics Research, vol. 32, no. 11, pp. 1303-1322, 2013.
- , “Probabilistic Mutual Localization in Multi-agent Systems from Anonymous Position Measures”, in 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 2010, pp. 6534-6540.
- , “Mutual Localization using Anonymous Bearing Measurements”, in 2011 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, San Francisco, CA, 2011, pp. 469-474.
- , “3D Mutual Localization with Anonymous Bearing Measurements”, in 2012 IEEE Int. Conf. on Robotics and Automation, St. Paul, MN, 2012.
- , “Two Measurement Scenarios for Anonymous Mutual Localization in Multi-UAV Systems”, in 2nd IFAC Workshop on Multivehicle Systems, Espoo, Finland, 2012.
- , “Ground and Aerial Mutual Localization using Anonymous Relative-Bearing Measurements”, IEEE Transaction on Robotics, vol. 32, no. 5, pp. 1133-1151, 2016.










