Submitted by Antonio Franchi on
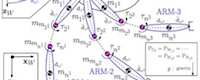 This video introduces the differential flatness and control of protocentric aerial manipulators with any number of arms and possible elastic joints.
This video introduces the differential flatness and control of protocentric aerial manipulators with any number of arms and possible elastic joints.
See [1] for the paper describing the method used in the following video.
References
- , “Differential Flatness and Control of Protocentric Aerial Manipulators with Any Number of Arms and Mixed Rigid-/Elastic-Joints”, in 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and System, Daejeon, South Korea, 2016, pp. 561-566.










