Simon Lacroix
Research scientist in mobile robotics
Simon Lacroix
Research scientist in mobile robotics

LAAS/CNRS simon.lacroix at laas.fr
Robotics and InterationS group +33 561 33 62 66
7, Avenue du Colonel Roche
BP 54200
31031 Toulouse Cedex 4, France
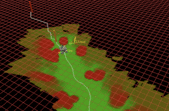
 Environment perception and modeling
Environment perception and modeling

Vision-based localization and SLAM

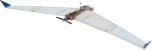
Autonomous rover navigation

Multi-robot cooperation
Any robotic mission can be more efficiently androbustly achieved by a team of robots. So far, our work in this area as mainly consisted in conceiving and developing algorithms and architecture for multi-UAVs cooperation and coordination. Our main interest is currently focused on air/ground robotics systems of systems: one of the main challenge is here to build environment representations that integrate aerial and ground data.





Research interests: autonomous field robotics