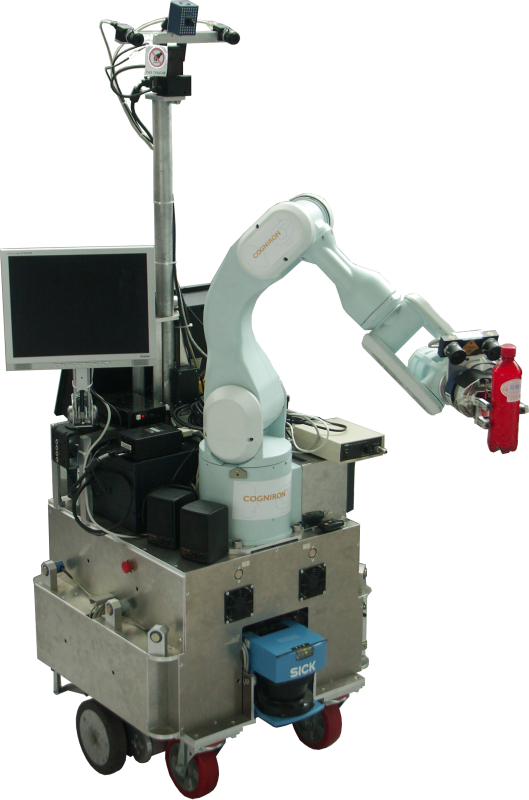
Jido
A Platorm built by
Neobotix, equipped with a
6 degrees of freedom Mitsubishi PA-10 manipulator arm and a 3 fingers
tactile hand.
Characteristics:
| Wheels: | 2 driving wheels + 3 free wheels |
| Batteries: | 48V, 80Ah |
| Processors: | 2 PCs with Pentium IV |
| Operating system: | Linux |
| Communication: | Ethernet radio modem (11 Mbit/s) |
| Sensors: | odometry,
1 gyrometer,
8 Sonar range sensors,
1 2D Sick Laser Range Finder (front)
mounted on a tilt platform,
1 2D Sick Laser Range Finder (rear),
1 pair of stereo cameras on a panoramic pan/tilt
platform,
1 pair of color stereo cameras on the end axis of the manipulator,
1 force sensor at the manipulator hand,
6 tactile sensors on the hand,
2 contraint jauges on the fingers
| | Dimensions (LxWxH): | 65cm x 65cm x 190cm |
| Weight: | 250kg |
|
|
|
Copyright © 2005-2006 CNRS-LAAS
|