 Consider the problem of localizing and encircling a target using a multi-robot system. This kind of task is interesting in view of the large number of potential applications, among which we mention observation (retrieve and merge data about an object from different viewpoints), escorting (protect a member of the system from unfriendly agents) and entrapment (prevent the motion of an alien object).
Consider the problem of localizing and encircling a target using a multi-robot system. This kind of task is interesting in view of the large number of potential applications, among which we mention observation (retrieve and merge data about an object from different viewpoints), escorting (protect a member of the system from unfriendly agents) and entrapment (prevent the motion of an alien object).
In [1], and more extensively in [2] we present a control scheme for achieving multi-robot encirclement in a distributed way, i.e., with each robot using only local information gathered by on-board relative-position sensors. In particular, these are assumed to be noisy, anisotropic, and unable to detect the identity of the measured object. Communication between the robots is provided by limited-range transceivers. Experimental results with stationary and moving targets support the theoretical analysis.
To localize both the target and the other robots, a decentralized mutual localization module runs on each robot. This module, whose design is based on our previous work [3],[4], overcomes the limitations of our sensors. See the mutual localization page for more details.
Experiments
Encirclement of a stationary target (mp4 clip)
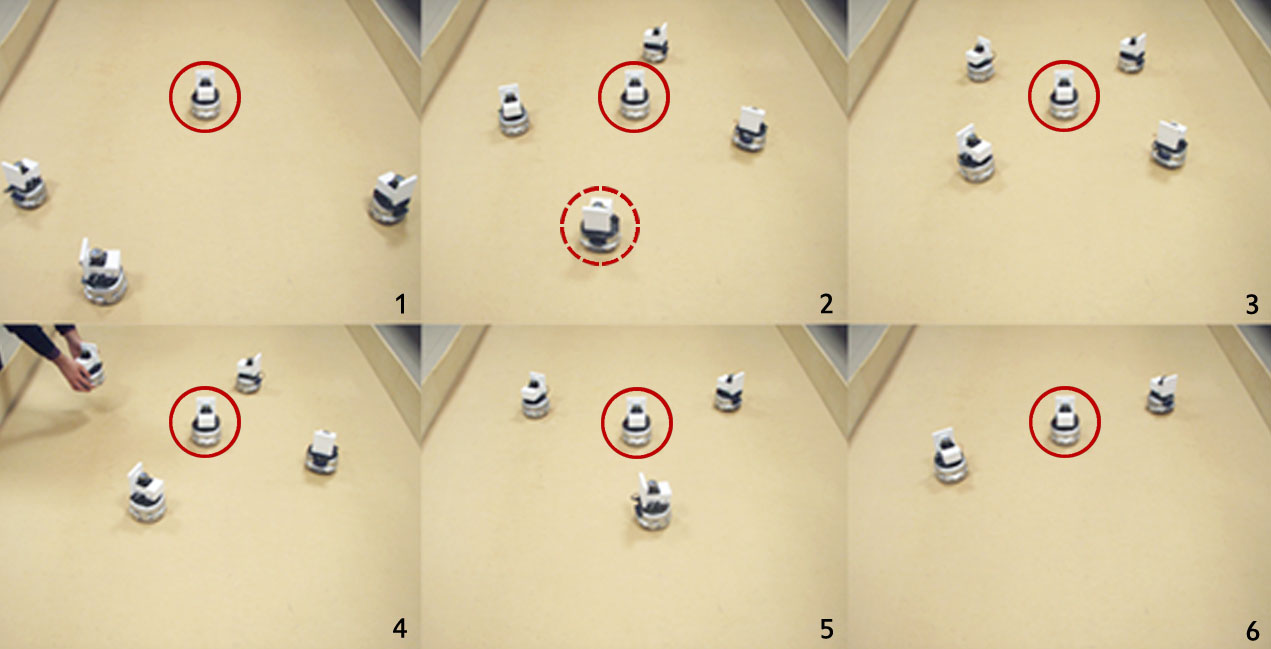
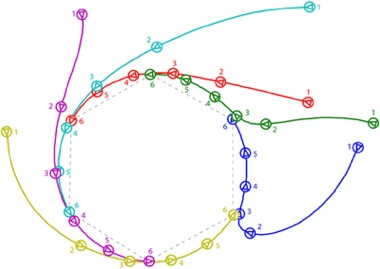
In this video, we show an experiment of encirclement performed with five Khepera III robots; each robot is also equipped with a wireless card and a Hokuyo URG-04LX laser rangefinder. One of the robots acts as a the stationary target. The video shows the live scene as well as the estimates computed by the four robots used for encirclement. In the first phase of the experiment, the robots reach a regular formation. Then one of the robot is kidnapped and released in a displaced position. The encirclement system is very quick to react and recover the correct formation. In the final phase of the experiment, two more robots in succession are kidnapped and powered off, and the remaining robots arrange themselves first as a 3-robot and then as a 2-robot regular formation.
Encirclement of a moving target (mp4 clip)
In this video, we show another experiment in which three robots encircle a moving target. We obtained satisfactory results as long as the speed of the target remains at least one order of magnitude smaller than that of the robots.
Credits
Based upon the encirclement page of "La Sapienza" robotics lab.
References
- , “Distributed Target Localization and Encirclement with a Multi-robot System”, in 7th IFAC Symposium on Intelligent Autonomous Vehicles, Lecce, Italy, 2010.
- , “Decentralized Multi-Robot Encirclement of a 3D Target with Guaranteed Collision Avoidance”, Autonomous Robots, vol. 40, no. 2, pp. 245-265, 2016.
- , “Mutual Localization in a Multi-Robot System with Anonymous Relative Position Measures”, Department of Computer and System Sciences Antonio Ruberti, 2009.
- , “On the Solvability of the Mutual Localization Problem with Anonymous Position Measures”, in 2010 IEEE Int. Conf. on Robotics and Automation, Anchorage, AK, 2010, pp. 3193-3199.










